یکی از سوالاتی که ذهن نقشه بردار را جهت خرید گیرنده GNSS مجهز به تیلت سنسور مشغول میکند، تفاوت عملکرد تیلت سنسور مبنی بر IMU و تیلت سنسور مغناطیسی است. اینکه تکنولوژی کدام یک از این دو به روزتر و مناسب برای برداشتهای نقشه برداری است.
به همین منظور، در این مقاله نحوه عملکرد هر یک از این نوع تیلت سنسورها مورد بررسی قرار گرفته و تفاوتها و مزایا و معایب آنها عنوان شده است.
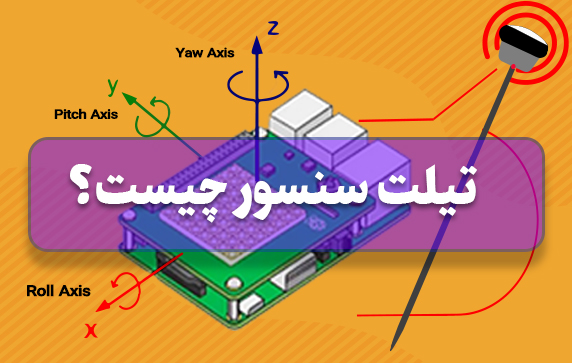
تیلت سنسور چیست؟
برای اندازهگیری زاویه تیلت (که به معنای کجی و یا انحراف از قائم است) در گیرندههای مولتی فرکانس جی پی اس/ جی ان اس اس (GPS/GNSS) از تیلت سنسور استفاده میشود. مزیت استفاده از تیلت سنسور در گیرندههای نقشه برداری جی پی اس/ جی ان اس (GPS/GNSS)، این است که در شرایطی که امکان قائم نگهداشتن گیرنده روی نقطهای که درحال برداشت یا پیادهسازی است، وجود ندارد میتوان اثر این کجی را با استفاده از محاسبه زاویه تیلت، از روی مشاهدات حذف نمود. و به مختصات دقیق نقطه رسید.
انواع تیلت سنسور
تیلت سنسورها به طور کلی به دودستهی مغناطیسی (Magnetometer) و تیلت سنسورهای برمبنای IMU، تقسیمبندی میشوند.
IMU چیست؟
IMU مخفف (Inertial Measurement Unit) و به معنای واحد اندازهگیری اینرشیال است و از آن برای توصیف مجموعهای از ابزارهای اندازهگیری استفاده میشود. هنگامیکه این واحد اندازهگیری در گیرنده مولتی فرکانس نقشه برداری جی پی اس/ جی ان اس GPS/GNSS نصب شود. ابزارهای موجود در این واحد، میتوانند دادههای مربوط به دوران و حرکت دستگاه جی پی اس (GPS) را ثبت کنند. IMU، سنسورهایی مانند شتاب سنج ها، ژیروسکوپ ها، و تیلت سنسورهای مغناطیسی را دربرمیگیرد.
IMU چگونه کار میکند؟
IMU پارامترهای مختلفی از جمله جهت، شتاب، سرعت زاویهای و در صورت وجود مغناطیس سنج، میدان های مغناطیسی اطراف دستگاه را اندازهگیری میکند. هرکدام از اجزا IMU میتواند نوع خاصی از دادهها را اندازهگیری نماید:
ژیروسکوپ: دوران و سرعت دورانی را اندازهگیری میکند.
شتاب سنج: سرعت و شتاب را اندازهگیری میکند.
مغناطیس سنج: راستای جهات اصلی گیرنده را مشخص میکند.
جهت دستیابی به یک خروجی دقیق از سنسور IMU، سنسور IMU مشاهدات مختلف ابزارهای خود را با هم ترکیب میکند.
بیان این نکته حائز اهمیت است که، از آنجا که مغناطیس سنج تحت تأثیر میدان مغناطیسی محیط قرار دارد، در گیرندههای GNSS، به منظور تعیین جهت شمال از مغناطیس سنج موجود در IMU استفاده نمیگردد و برای این مهم از دو موقعیت دقیق اندازهگیری شده توسط گیرنده در قالب راه اندازی اولیه (یا فعال سازی) تیلت سنسور استفاده میشود.
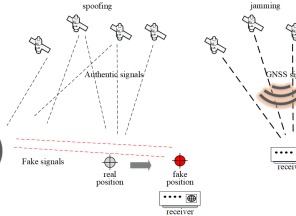
GNSSدر تعیین موقعیت به وسیلهی گیرندههای GNSS، IMUها میتوانند به عنوان یک ابزار مکمل برای تعیین موقعیت با استفاده از گیرنده GPS چند فرکانسه (مولتی فرکانس) عمل کنند. و باعث خواهند شد تا در صورت از دست رفتن اتصال ماهواره با گیرنده، عملیات ناوبری با موقعیت محاسبه شده توسط این سنسورها، ادامه یابد.
البته علاوه بر کاربردهای آنها در ناوبری، میتوانیم تقریبا در هر زمینهای که نیاز به تشخیص حرکت وجود داشته باشد، از IMUها استفاده کنیم.
ساختار IMU
IMUها از نظر ساختاری معمولا شامل اجزا زیر است:
سه شتاب سنج عمود بر هم، برای اندازهگیری مستقل شتاب در سه محور عمود بر هم جهت اندازهگیری مستقل شتاب در سه محور Y ,Xو Z
سه ژیروسکوپ عمود برهم، جهت اندازهگیری سرعت زاویهای در سه راستای X ، Y و Z
سخت افزار و نرم افزار درونی برای پردازش سیگنال دیجیتال تولید شده
سخت افزار و نرم افزار درونی برای ایجاد یک رابط ارتباطی
محفظه نگهدارنده اجزای IMU
نتایج حاصل از اندازهگیری های شتاب سنج ها و ژیروسکوپ ها در بخش پردازش سیگنال با سرعت بالایی پردازش میشوند و از نتایج این پردازش، یک دوران کلی و یک شتاب برای کل سیستم، حاصل میشود.
اندازهگیریهای IMU، به عنوان داده های ورودی سیستم ناوبری اینرشیال INS (Inertial Navigation System) استفاده میشوند و نتیجه نهایی، ترکیب دادههای IMU با دادههای حاصل از اندازهگیری GNSS بعنوان مکان، سرعت و وضعیت گیرنده خواهدبود.
محاسبه زاویه تیلت توسط IMUها
تیلت سنسور مبتنی بر IMUاخیرا در تمام دنیا، در گیرندههای GNSS پیشرفته به کار گرفته شده و تکنولوژی نسبتاً نوینی به شمار میرود.
IMU مورد استفاده در گیرندههای نقشه برداری، فناوریای بر پایه MEMS(Micro Electro Mechanical System) است که در آن از سنسورهای شتاب سنج برای اندازهگیری زاویه تیلت یا شیب نسبت به صفحه افق و از سنسورهای ژیروسکوپ برای اندازهگیری زاویه دوران نسبت به صفحه قائم استفاده میشود.
بنابراین با استفاده از این سنسورها میتوان زاویه تیلت را اندازهگیری نمود که به علت سرعت پردازش بالا در IMUها، میتوان به سرعت زاویه تیلت محاسبه شده را به اندازهگیریها اعمال نمود و در نتیجه به موقعیت دقیق صحیح هر نقطه رسید.
همگام با تکنولوژی روز دنیا شرکت مکان پرداز رایمند نیز از آخرین تکنولوژی استفاده شده در IMUها در گیرنده های جی پی اس/ جی ان اس (GPS/GNSS) خود استفاده میکند.
تکنولوژی استفاده شده در IMU های جدید، از سه شتاب سنج و سه ژیروسکوپ برای ارائه اطلاعات لازم برای موتور موقعیت یابی جهت تعیین وضعیت دقیق گیرنده GPS تشکیل شدهاست. که به گیرنده جی ان اس اس اجازه میدهد تا تیلت و بنابراین موقعیت دقیق نقطه را بطور آنی محاسبه کند.
تفاوت بین ابزارهای مختلف سنجش تیلت در تعیین موقعیت بصورت آنی (تعیین موقعیت RTK)
همانطور که گفته شد، تیلت سنسورها وظیفه اندازه گیری زاویه تیلت (جدایی از قائم) را برعهده دارند و تفاوت اصلی بین تیلت سنسورهای مختلف، در ابزار اندازهگیری زاویه تیلت در آنهاست.
مثلا تیلت سنج های مغناطیسی از مغناطیس سنج ها برای اندازهگیری زاویه تیلت استفاده نموده و تیلت سنج های مبتنی بر IMU از ژیروسکوپ ها و شتاب سنج ها برای بهبود کیفیت و دقت در محاسبه زاویه تیلت استفاده مینمایند.
از آنجا که استفاده از تکنولوژی تیلت سنسورهای مبتنی بر IMU جهت اندازهگیری و تصحیح زاویه تیلت در اندازهگیری مختصات دقیق نقطه، توسط گیرنده جی پی اس/ جی ان اس اس، یک تکنولوژی جدید و البته بسیار دقیق و کارا در شرایط مختلف است، تولیدکنندگان مطرح گیرندههای جی پی اس/ جی ان اس (GPS/GNSS) در تمام دنیا از این تکنولوژی جهت اندازهگیری و تصحیح زاویه تیلت استفاده میکنند.
سنسورهای اندازهگیری تیلت بر مبنای IMU در شرایط مختلف از نظر زمانی، مکانی، نحوه راهاندازی و کالیبراسیون و… دارای مزیتهای بارزی نسبت به تیلتسنسورهای مغناطیسی هستند که به بعضی از آنها در زیر اشاره شدهاست:
1- تفاوت در عملیات برداشت در مناطق تحت تاثیر میدانهای مغناطیسی
بعنوان تفاوت اصلی بین تکنولوژی های جدید مورد استفاده در IMUها و تیلت سنسورهای مغناطیسی برای تصحیح زاویه تیلت (انحراف از قائم) ، میتوان به این موضوع اشاره کرد که تکنولوژی مورد استفاده در تیلت سنسورهای مغناطیسی بطور کلی وابسته به دقت و صحت مدلسازی میدان مغناطیسی زمین است. همچنین چون گیرنده GNSS به طور کلی در معرض منابع محلی تداخلات مغناطیسی است، میتواند باعث شود تا اندازهگیری صحیح زاویه تیلت با استفاده از تیلت سنسورهای مغناطیسی در مناطقی که امکان رخداد تداخلات مغناطیسی وجود دارد، ممکن نبوده و استفاده از گیرندههای جی پی اس/ جی ان اس اس در چنین مناطقی، عملا غیرممکن باشد.
در مقابل، سیستم IMU با اندازهگیری دقیق زوایای Roll و Pitch با استفاده از شتاب سنج و ژیروسکوپ موجود در خود، تحت تأثیر عوامل محیطی نبوده و همواره در همه محیط ها میتواند زاویه تیلت را تا زاویه 60 محاسبه نموده و به اندازهگیریهای انجام شده اعمال نماید و در نتیجه؛ گیرنده GNSS قابلیت استفاده و محاسبه موقعیت بصورت مایل تا 60 درجه را خواهدداشت.
2- تفاوت در میزان زاویه تیلت قابل برداشت
بیشترین زاویه تیلتی که گیرندههای مغناطیسی میتوانند حس کرده و جهت تعیین موقعیت دقیق محاسبه نمایند، 15 درجه است. بنابراین با استفاده از گیرندههای قدیمیتر و یا گیرندههای GNSS ای که از تکنولوژیهای قدیمی تیلت سنسور مانند تیلت سنسورهای مغناطیسی استفاده میکنند، نمیتوان برداشت نقاط را در همه مناطق و شرایط، انجام داد. بعلاوه، در تیلت سنسورهای مغناطیسی امکان پیادهسازی نقاط نیز وجود ندارد.
در گیرندههای جدیدی که از تکنولوژی تیلت سنسور برمبنای IMU استفاده میکنند، محدودیت خاصی در عملکرد تعیین شده برای اندازهگیری زاویههای شیب وجود ندارد و با استفاده از فناوریهای استفاده شده در سنسورهای IMU جدید، حتی تا 60 درجه هم امکان اندازهگیری زاویه تیلت وجود دارد.
به عنوان یک اصل کلی در گیرندههای GPSای که از تکنولوژی تیلت سنسور مبتنی بر IMU استفاده میکنند، عامل محدود کننده اصلی هنگام اندازهگیریهای مایل، دریافت ماهواره GNSS است و کاربران همیشه باید هنگام اندازهگیری نقاط با زاویه شیب بالاتر از 30 درجه، درمورد از دست نرفتن دریافت سیگنال احتیاط کرده و بررسیهای اضافی (مانند بررسی عدد DOP) را انجام دهند.
3- تفاوت در مدت زمان برداشت
از آنجایی که عملیات برداشت و پیادهسازی با استفاده از تیلت سنسورهای قدیمیتر، به زمان بیشتری جهت توقف در هر نقطه برای انجام عملیات برداشت نیاز دارد، برای انجام تعیین موقعیت و اندازهگیریها، زمان بیشتری مصرف شده و بنابراین سرعت اندازهگیریها را کاهش خواهد داد. که همین باعث طولانیتر شدن عملیات برداشت خواهدشد.
برعکس با بهکارگیری تکنولوژی IMU در گیرندههای نقشه برداری جی پی اس/جی ان اس اس (GPS/GNSS) نیازی به ثابت نگهداشتن در محل نقطه به مدت طولانی نیست و به راحتی با محاسبه موقعیت آنی پای ژالن میتوان عملیات برداشت و پیادهسازی را با سرعت مناسبی انجام داد.
4- تفاوت در مراحل راهاندازی و کالیبراسیون گیرنده
IMUهای جدید با استفاده از تکنولوژیهای موجود، از دادههای سنسورهای خود برای توجیه كردن خودكار IMU در چارچوب مرجع GNSS استفاده میکنند، بنابراین برخلافMagnetometer ها (تیلت سنسورهای مغناطیسی) نیازی به انجام مراحل خاص و پیچیده برای کالیبره نمودن و راهاندازی ندارند.
به طور کلی در تکنولوژیهای جدید مورد استفاده در IMU، تا زمانی که IMU از حرکت کافی برخوردار باشد، سنسور تراز خود را از دست نمیدهد. که این مهم معمولاً در صورت استفاده نقشهبردار از گیرنده سر زمین و هنگام انجام عملیات، اتفاق می افتد.
یکی دیگر از مزایای تکنولوژی جدید تیلت سنسورهای مبتنی بر IMU این است که اگر ژالن ثابت باشد، سیستم تشخیص میدهد و تا زمانی که ژالن دوباره تغییر نکند، توجیه جدیدی برای سیستم احتیاج نیست. معنی این امر این است که اگر کاربر بخواهد شروع به برداشت یا پیادهسازی نقطهی جدیدی کند، تا زمانی که گیرنده جی ان اس اس درحال دریافت ماهواره GNSS مناسب باشد، سیستم همچنان توجیه خواهد بود.
بنابر مزیتهای شرح داده شده از تیلت سنسورهای مبتنی بر IMU نسبت به تیلت سنسورهای مغناطیسی، در برداشت نقاط بصورت مایل به وسیلهی گیرندههایی که از تکنولوژی تیلت سنسور مبتنی بر IMU استفاده میکنند امکان اندازهگیریهای مایل بدون تاثیر پذیرفتن از محیط اطراف گیرنده GNSS و عدم نیاز به کالیبراسیون و راهاندازیهای سخت و پیچیده، استفاده از تیلت سنسورهای مبنی بر IMU انتخابی درست و اقتصادی در برداشت نقاط و تعیین موقعیت دقیق به وسیلهی گیرندههای جی پی اس چندفرکانسه است.
به همین منظور گیرندههای iRoPro و iRoProII شرکت مکانپرداز رایمند نیز همگام با تکنولوژی روز دنیا این امکان را برای کاربران فراهم میکنند تا موقعیت دقیق نقاط با استفاده از محاسبه زاویه تیلت به وسیله تیلت سنسورهای مبتنی بر IMU حتی دربرداشتهای انجام شده با زاویه تیلت (برداشت مایل) در مناطق چالشی، با درصد اعتماد بالایی از نتایج تعیین موقعیت، محاسبه و ارائه شود.
کلید واژه: تیلت سنسور، تیلت سنسور IMU، تیلت سنسور مغناطیسی، زاویه تیلت، برداشت، گیرنده GNSS، جی پی اس/ جی ان اس اس، IMU
منابع:
https://www.programmersought.com/article/76324595135
https://www.vectornav.com/products/detail/vn-100?gclid=Cj0KCQjw_8mHBhClARIsABfFgpiYTyGnKaQ4nUDMUw3tPknazmCQZZWC69C8SQzRdLyUob53zzHdkMaAlw-EALw_wcB
https://r12i.trimble.com/img/Trimble%20R12i%20Customer%20FAQs.pdf
https://www.posital.com/en/products/inclinometers/mems/MEMS-Technology.php
https://scialert.net/fulltext/?doi=jas.2009.2451.2456
https://www.arrow.com/en/research-and-events/articles/imu-principles-and-applications
نویسنده : ثمین نصر
کارشناس تولید محتوا در شرکت مکان پرداز رایمند
سایر مقالات را می توانید در این قسمت ببینید.











سلام هزینه تهیه سنسور تیلت برای raymax pro چقد هست ممنون
درود لطفا برای استعلام قیمت تماس بگیرید