مفهوم پارامتر Age در برداشت RTK با گیرنده جی ان اس اس (GNSS)

شرکت مکانپرداز رایمند
مدت زمان مطالعه: 6 دقیقه
مقدمه
تعیین موقعیت دقیق به وسیله ی گیرنده های جی ان اس اس (GNSS) چند فرکانسه، با استفاده از سیگنال ارسال شده توسط ماهواره های جی ان اس اس (GNSS) محاسبه میشود. از آنجا که این سیگنال تحت تأثیر اثرات محیطی و جوی مختلفی قرار میگیرد، لازم است تا برای رسیدن به موقعیت دقیق نقاط، یکسری تصحیحات به مشاهدات ارسالی از ماهواره GPS/GNSS اعمال شود. این تصحیحات می تواند با روش های مختلفی محاسبه و به موقعیت اعمال شود.
ساز و کار ارسال تصحیحات به گیرنده های مولتی فرکانس GPS/GNSS
تصحیحات تعیین موقعیت را میتوان توسط یک ایستگاه مرجع، برای گیرنده روور ارسال کرد تا دقت تعیین موقعیت را بهبود بخشد. بدین صورت که گیرنده مرجع ثابت که موقعیت مشخصی دارد، پیام های تصحیحاتی را محاسبه نموده و به موقعیت گیرنده روور ارسال میکند. موقعیت ایستگاه Rover در حالت عادی دقت بالایی ندارد و برای محاسبه موقعیت دقیق، از معادلات GNSS بصورت دیفرانسیلی با استفاده از اطلاعات مشاهدات و تصحیحات مربوط به گیرنده مرجع استفاده میشود.
در هر لحظه گیرنده روور، اطلاعات موقعیتی خود را به سرور ارسال میکند. در سرور، با مقایسه موقعیت ارسال شده با اطلاعات موقعیتی گیرنده های مرجع، نزدیکترین ایستگاه به گیرنده روور شناسایی شده و تصحیحات و مشاهدات تولید شده توسط آن، برای Rover ارسال میشود.
انواع انتقال داده های تصحیحاتی به گیرنده Rover
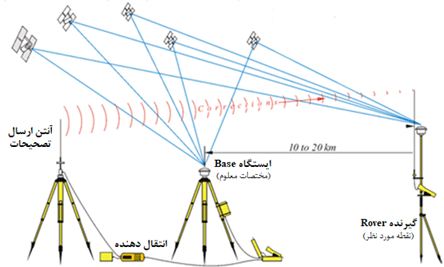
در RTK کلاسیک بعنوان یک روش سنتی ارسال تصحیحات از طریق لینک رادیویی بین گیرنده بیس و روور انجام می شود. نقشه برداری در این حالت، نیازمند دو گیرنده روور مجهز به ماژول رادیو است. از طرفی لازمه برقراری ارتباط رادیویی بین دو گیرنده، دید مستقیم بین آن دو است و این مسئله محدودیت برد برای ارسال تصحیحات در شرایط محیطی مختلف (وجود موانع) را در پی دارد.
شکل 1: انتقال تصحیحات از طریق ارتباط رادیویی
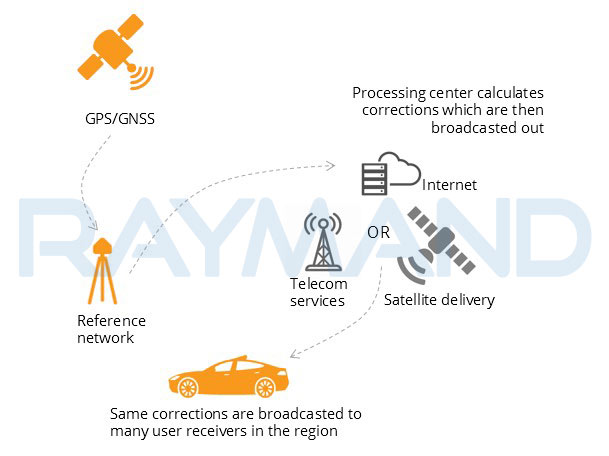
امروزه با توسعه شبکه های جی ان اس اس و پیشرفت تکنولوژی در گیرنده های نقشه برداری جدید، اغلب تصحیحات مربوط به تعیین موقعیت GNSS از طریق سرویسهای اشتراکی ارسال میشود. در این روش، بجای استفاده از دو گیرنده (یکی بیس و دیگری روور) تنها از یک گیرنده روور جهت تعیین موقعیت به روش RTK استفاده میشود. تصحیحات تولید شده در سرور، میتواند از طریق اینترنت (با استفاده از پروتکل NTRIP) و یا ماهوارههای زمین آهنگ (L-BAND) توسط گیرنده های GPS/GNSS به گیرنده، ارسال شود.
شکل 2: انتقال تصحیحات از طریق اینترنت (NTRIP) و ماهواره های زمین آهنگ
در برداشت RTK (چه به روش رادیویی و چه به صورت اینترنتی (NTRIP)) یکی از پارامترهای مهم که بر صحت تعیین موقعیت توسط گیرنده Rover تأثیر بسزایی دارد، پارامتر Age است. در ادامه به معرفی و بررسی بیشتر پارامتر Age خواهیم پرداخت. البته در این مقاله، صرفاً به بررسی ارسال تصحیحات به روش اینترنتی (NTRIP) پرداخته می شود.
Age چیست؟
عدد Age اصطلاحاً به معنی عمر تصحیحات دریافت شده توسط Rover است که بر حسب ثانیه ارائه میشود. لازم بذکر است که در ادبیات اصطلاحی GNSS به این پارامتر، Latency (به معنی تأخیر) نیز میگویند. Latency را میتوان به دو نوع تقسیم نمود: تأخیر در پردازش که ناشی از زمان محاسبات است و تأخیر در انتشار که به دلیل ارسال تصحیحات رخ میدهد.
تأخیر در پردازش مربوط به مدت زمانی است که پردازنده جهت محاسبه تصحیحات در گیرنده مرجع و همچنین محاسبه برای تعیین عدد صحیح ابهام فاز در گیرنده روور صرف میکند. تأخیر در انتشار نیز از مدت زمان لازم جهت انتقال اطلاعات تصحیحاتی از گیرنده مرجع به گیرنده روور ناشی میشود.
در روش RTK تحت شبکه (NRTK) ، فرآیند تولید تصحیحات توسط گیرنده مرجع تا اعمال آن به موقعیت گیرنده روور، به بخش های زیر تقسیم بندی می شود:
• محاسبه تصحیحات توسط گیرنده مرجع
• قرار دادن در پیغام RTCM
• ارسال پیغام RTCM از گیرنده مرجع به سرور مرکزی
• رمزنگاری TCP/IP توسط سرور
• انتشار از طریق شبکه GPRS
• رمزگشایی TCP/IP توسط ماژول GPRS
• ارسال به گیرنده Rover
• محاسبه در گیرنده روور جهت حل ابهام فاز
معمولاً در شرایط ایده آل، هر یک از مراحل فوق در کسری از ثانیه انجام شده و به طور مجموع تمامی این مراحل حدود 1 تا 2 ثانیه طول میکشد.
تأثیر عدد age بر روی تعیین موقعیت توسط گیرنده GPS/GNSS
اگر محاسبات مربوط به تصحیحات در گیرنده مرجع در زمان t0 آغاز شده و در لحظه t این تصحیحات به موقعیت گیرنده Rover اعمال گردد، بنابراین t-t0 بیانگر عمر تصحیحات و میزان تأخیر در دریافت تصحیحات است.
بعنوان مثال اگر عدد Age برابر با 5 باشد به معنای این است که آخرین تصحیح دریافت شده توسط Rover، پنج ثانیه قبل در گیرنده مرجع محاسبه شده است. از آنجا که همراه با تصحیحات، مشاهدات ذخیره شده مربوط به هر اپک در گیرنده مرجع نیز ارسال میشود، در گیرنده روور نیز مشاهدات مربوط به همان اپک زمانی جهت تعیین موقعیت به کار گرفته میشود. در این صورت موقعیتی که در حال حاضر در گیرنده روور نمایش داده میشود مربوط به 5 ثانیه قبل است.
بنابراین اگر موقعیت گیرنده روور در مدت این 5 ثانیه تغییر کرده باشد، صحت موقعیت ارائه شده توسط Rover برای نقطهی برداشت کاهش مییابد. چرا که مشاهدات مربوط به اپک 5 ثانیه قبل در گیرنده مرجع به گیرنده Rover رسیده و در معادلات تفاضلی دو گانه جهت تعیین موقعیت استفاده میشود.
بنابراین هر چه عدد age بزرگتر باشد، به همان میزان قابلیت اعتمادپذیری به تصحیحات و تعیین موقعیت کاهش مییابد. در کل بالا بودن عدد Age منجر به کاهش صحت تعیین موقعیت ثبت شده توسط گیرنده روور میشود.
در برداشت های عادی نقشه برداری RTK به صورت اینترنتی، معمولاً سرعت جابجایی گیرنده خیلی کم بوده و عدد Age نیز اکثراً کمتر از 2 ثانیه است، در نتیجه تأثیر ناچیزی بر روی صحت برداشت دارد.
اما در برداشت هایی که در حال حرکت و با سرعت بالاتری (نصب گیرنده بر روی یک اتومبیل) انجام میشود، این تأخیر چند ثانیه ممکن است صحت مختصات را در حد چند متر تحت الشعاع قرار دهد. برای مثال، برایان در سال 2011 با توجه به تست میدانی در چهارچوب یک تحقیق علمی نشان داد که اگر سرعت حرکت گیرنده حدود 50 کیلومتر بر ساعت بوده و Age برابر با 0.155 ثانیه باشد، 2.153 متر جابجایی در موقعیت رخ میدهد.
کلید واژه: تصحیحات اینترنتی، NTRIP، L-BAND، Age، عمر تصحیحات، Latency، RTK تحت شبکه، NRTK، RTCM، تعیین موقعیت آنی، RTK
منابع
http://lefebure.com/articles/rtk-correction-data-age-accuracy
https://community.emlid.com/t/age-of-rtk-corrections-fixed-solution-accuracy/9116
Calculation and Comparison of the Noise and Latency of RTK Observations using Radio Link and NTRIP
https://eprints.usq.edu.au/22624/1/Penman_2011.pdf
RTK Latency Estimation and Compensation Method for Vehicle Navigation System
https://www.koreascience.or.kr/article/JAKO201714563379342.pdf
http://www.wasoft.de/e/iagwg451/wegener/communication.html
https://www.e-education.psu.edu/geog862/node/1842
Swedish User Guidelines for Network RTK https://www.lantmateriet.se/globalassets/kartor-och-geografisk-information/gps-och-geodetisk-matning/publikationer/nkg2010_swedish_userguidelines_odolinski.pdf
User Guidelines for Single Base Real Time GNSS Positioning
https://www.ngs.noaa.gov/PUBS_LIB/NGSRealTimeUserGuidelines.v2.1.pdf
نویسنده ثمین نصر
کارشناس تولید محتوای شرکت رایمند
سایر مقالات را می توانید در این قسمت ببینید.











مقالات شرکت دانش بنیان رایمند بسیار پر محتوا و آموزنده است.
با سلام.
عدد صفر نشان دهنده چیست؟
سلام مهندس در این صورت ارتباط گیرنده شما با سامانه ارسال کننده تصحیحات قطع شده.
Mode چی رو نشون میده؟