
خطاهای موجود در تعیین موقعیت ماهوارهای با استفاده از گیرنده جی ان اس اس/جی پی اس، همبستگی مکانی و زمانی داشته و در ایستگاههای GNSS نزدیک به هم، مقدار این خطاها تقریباً برابر است. با توجه به این موضوع، در تعیین موقعیت نسبی به کمک جی پی اس/جی ان اس اس، میتوان دقت بهتری نسبت به تعیین موقعیت مطلق رسید. در تعیین موقعیت نسبی با در اختیار داشتن ایستگاههای مرجع با مختصات معلوم (مختصات ژئودتیک (WGS84) یا مختصات یو تی ام (UTM))، اختلاف مختصات بین گیرنده Rover و ایستگاه مرجع بدست میآید.
در این بین، 4 رویکرد جهت تعیین موقعیت نسبی وجود دارد که یکی مربوط به پسپردازش دادههای خام گیرنده Rover، با دادههای یک یا چندین ایستگاه مرجع است و 3 روش دیگر در حوزه تعیین موقعیت به صورت آنی قرار دارد. در تعیین موقعیت آنی، تصحیحات محاسبه شده در ایستگاه مرجع میبایست در قالب فرمت خاصی به گیرنده Rover ارسال شود. فرمت RTCM به عنوان یک فرمت استاندارد در سطح بینالمللی برای ارسال تصحیحات پذیرفته شده است و تقریباً تمامی گیرندهها این فرمت را پشتیبانی میکنند. در ایران نیز سازمان ثبت اسناد و املاک کشور، با معرفی سامانه شمیم بعنوان سامانه ارسال تصحیحات GPS ملی، به تمام گیرندههای نقشه برداری تصحیحات را ارسال میکند.
با توسعه و پیشرفت سیستمهای تعیین موقعیت ماهوارهای، نسخههای مختلفی از فرمت RTCM ارائه گردید. جهت تعیین موقعیت آنی (RTK) با دقت سانتیمتر، تصحیحات در قالب فرمت RTCM از طریق پروتکل NTRIP به گیرنده روور ارسال میگردد. در تعیین موقعیت آنی تحت شبکه (NRTK)، تصحیحات ارسالی توسط سِرور مرکزی در قالب فرمت RTCM به گیرنده Rover ارسال میشود.
بطور کلی تعیین موقعیت نسبی با جی پی اس (GPS) دقت بهتری نسبت به تعیین موقعیت مطلق دارد. علت آن این است که اکثر خطاهای فعال روی سیگنالهای ارسالی از سمت ماهوارههای GNSS (بایاسها) بسیار همبسته هستند. برای مثال خطاهای مداری (Ephemeris Errors) همبستگی مکانی دارند و مقدار آنها در ایستگاههای نزدیک به هم، مشابه است. پس بهمنظور کاهش تأثیر خطاهای موقعیتیابی و رسیدن به یک تعیین موقعیت دقیق، تعیین موقعیت نسبی یک گیرنده Rover با دانستن موقعیت دقیق یک ایستگاه مرجع (مثلاً استفاده از موقعیت دقیق ایستگاههای مرجع سامانه شمیم)، جایگزین مناسبی برای تعیین موقعیت مطلق است.
به طور کلی، منابع خطای مؤثر در تعیین موقعیت با استفاده از گیرنده GNSS را میتوان در سه دسته گروهبندی نمود:
برای به حداقل رساندن تأثیر خطاهای نوع 1، به جای مختصات مطلق، اختلاف مختصات نسبت به یک ایستگاه مرجع معلوم تعیین میشود. چهار رویکرد در این زمینه وجود دارد:
از شرایط لازم برای تعیین موقعیت نسبی این است که امکان دریافت اطلاعات، توسط گیرنده Rover وجود داشته باشد تا بتوان موقعیت دقیق آن را به دست آورد. در تعیین موقعیت آنی، ارسال کامل دادههای خام از ایستگاههای مرجع به گیرنده Rover به دلیل محدودیت در کانالهای ارتباطی امکانپذیر نیست. برای حل این مشکل، اطلاعات ارسالی از سمت سیستم GNSS، ابتدا در ایستگاه مرجع پردازش میشوند و تنها مجموعهای از تصحیحات به گیرنده Rover ارسال شده و موقعیت گیرنده Rover با دریافت این تصحیحات محاسبه میگردد.
با توجه به میزان دقت مورد انتظار، انواع مختلف تصحیحات وجود دارد. در تعیین موقعیت به صورت DGPS معمولی ارسال تصحیحات مشاهدات کد کافی است. در تعیین موقعیت به روش PDGPSتصحیحات مربوط به مشاهدات فاز موج حامل نیز لازم است. برای این منظور، استانداردهایی که توسط کمیته ویژه 104 کمیسیون فنی رادیو برای خدمات دریایی (RTCM SC-104 یا به طور خلاصه RTCM) تعیین شده است، امروزه در سطح بینالمللی پذیرفته شده و تقریباً همه گیرندهها امکان دریافت تصحیحات با فرمت RTCMرا پشتیبانی میکنند.
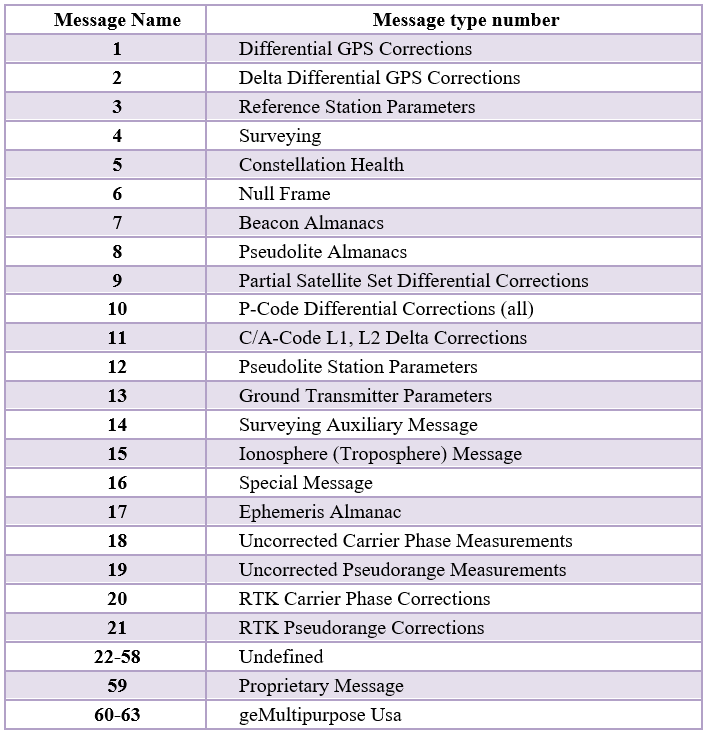
فرمت RTCMبه فرمت اطلاعات ناوبری GPS شبیه است. RTCMشامل 64 پیام است که در جدول 1 اطلاعات هر یک مشاهده میشود [2]:
اولین نسخه RTCM 1.0 در سال 1985 ساخته شد و در سال 1990، RTCM 2.0 جایگزین آن گردید. در این نسخه تصحیحات شبه فاصله کد و نرخ فاصله وجود دارد و در رویکرد (PDGPS ساده) مورد استفاده قرار میگیرد. همه اطلاعات لازم را با پهنای باند 1200 bps (bits per second) یا کمتر میتوان ارسال کرد. با توجه به نرخ اطلاعات و تعداد ماهوارهها، پهنای باند را به 100 bps میتوان کاهش داد.
نسخه RTCM 2.1 در سال 1994 ساخته شد و علاوه بر اطلاعات قبل، شامل دادههای فاز موج حامل نیز هست و با استفاده از آن، امکان حل ابهام فاز گیرنده Rover وجود دارد. از این نسخه، در تعیین موقعیت آنی RTK، در به حداقل رساندن خطاهای نوع سوم به منظور ارسال تصحیحات کد و فاز به گیرنده نقشه برداری GPS استفاده میشود. حداقل نرخ داده برای این نسخه 4800 bps است.
نسخه RTCM 2.2 در سال 1998 ایجاد شد و علاوه بر اطلاعات سابق، امکان ارسال تصحیحات حاصل از دیگر سیستمهای تعیین موقعیت و ناوبری ماهوارهای GNSSمانند گلوناس (GLONASS) فراهم گردید.
نسخه RTCM 2.3 در سال 2001 ایجاد شده و اطلاعات دیگری مانند PCV (Phase Centre Variation) آنتن را نیز شامل میشود.
نسخه RTCM 3.0 در RTK تحت شبکه، در به حداقل رساندن خطاها با رویکرد نوع چهارم کاربرد دارد. در ارسال تصحیحات در این فرمت، از سیگنالهای L2C و L5 در جی پی اس نیز استفاده شده است. لازم بذکر است که ارسال تصحیحات در سامانه شمیم بهطور پیشفرض در قالب RTCM 3.0 ارسال میشود، اما جهت بهرهمندی گیرندههای قدیمی از تصحیحات سامانه شمیم، فرمت RTCM 2.3 نیز در لیست قرار داده شده است.
نسخه RTCM 3.0 و RTCM 3.1 با هدف استفاده بهینه از پهنای باند ایجاد شدند و با استفاده از آنها دقت تعیین موقعیت بسیار بهبود یافت به طوری که با به کارگیری RTCM 3.1 در یک منطقه بسیار بزرگ میتوان به تعیین موقعیت
RTK پرداخت. نسخه RTCM 3.02 در سال 2011 ایجاد شد و علاوه بر اطلاعات قبل، امکان ارسال تصحیحات حاصل از دیگر سیستمهای تعیین موقعیت و ناوبری ماهوارهای GNSSمانند QZSS نیز فراهم گردید[3].
با فراهم شدن بستر اینترنت و راهاندازی ایستگاههای CORS، به منظور ارسال تصحیحات به گیرنده Rover، به کارگیری پروتکل NTRIP جایگزین RTK کلاسیک و ارتباط رادیویی گردید.
NTRIP برای ارسال و دریافت تصحیحات حاصل از سیستم تعیین موقعیت و ناوبری ماهوارهای GNSSشامل ماهوارههای جیپیاس (GPS)، گلوناس (GLONASS)، گالیله (GALILEO) و بیدو (BEIDOU) استفاده میشود. همانطور که اشاره شد این تصحیحات با فرمت RTCMارائه میگردد. سیستم NTRIP شامل سه بخش زیر است:
Caster به عنوان یک راه ارتباطی بین ایستگاه مرجع Base و گیرنده Rover میتواند کامپیوتر، تلفن هوشمند و یا کنترلر باشد. ایستگاه مرجع یا Server Base تصحیحات GNSS را از طریق سرور NTRIP به Caster ارسال نموده و گیرنده Rover تصحیحات را از طریق Caster دریافت میکند.
امکان ارسال و دریافت تصحیحات با 4 فرمت CMR، CMR+، RTCM 2.x و RTCM 3.x از طریق NTRIP وجود دارد. در تکنولوژیهای VRS، MAC و i-MAX در RTK تحت شبکه از NTRIP استفاده میشود [4].
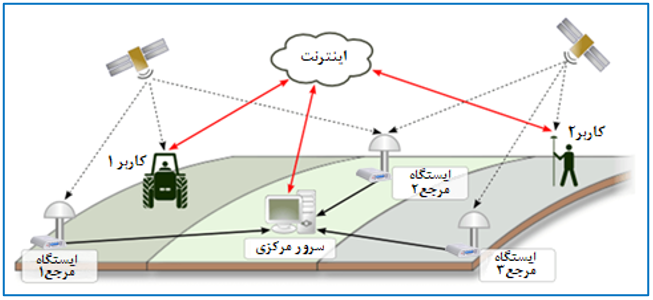
شکل 1: استفاده از پروتکل NTRIP در NRTK
موضوع مقاله: معرفی فرمت استاندارد RTCM در گیرنده GPS/GNSS نقشه برداری
تهیه و تنظیم: مروارید آرین نسب، محراب یوسفی، کارشناس ارشد ژئودزی
تاریخ نگارش: 16 آذر 1399












جهت تعیین موقعیت آنی RTK با چه دقتی، تصحیحات در قالب فرمت RTCM ارسال میگردد؟
با دقت سانتی متر ارسال می گردد