بهمنظور اطمینان از صحت و دقت گیرنده GNSS در تعیین موقعیت RTK از تستهای میدانی ارائه شده توسط ISO استفاده میشود.
چکیده
روش تعیین موقعیت نسبی RTK، یکی از روشهای متداول در تعیین موقعیت با گیرندههای جی ان اس اس ( GNSS) است. بهمنظور اطمینان از صحت و دقت گیرنده GNSS، روشهای تست میدانی توسط استاندارد بینالمللی (ISO) ارائه شده است. در تست ISO، دو گیرنده Rover با فاصله حداقل 2 و حداکثر 20 متر نسبت به یکدیگر و یک ایستگاه CORS مورد نیاز است. فاصله افقی و ارتفاعی بین دو نقطه Rover میبایست با روشهای دیگری با دقتی بهتر از 3 میلی متر اندازه گیری شود. دو روش تست میدانی ISO وجود دارد، روش اول ISO، تست ساده است که در آن یک سری مشاهدات شامل 5 بار اندازه گیری توسط هر گیرنده انجام میشود. در این روش، برداشت های Rover با فاصله زمانی 5 دقیقه انجام شده و قبل از هر اندازه گیری نیز میبایست دستگاه یک بار خاموش و روشن شود. در این روش صرفاً یک انحراف استاندارد از مشاهدات گیرنده ها تعیین میشود و نمیتوان از آزمونهای آماری استفاده نمود. روش دوم ISO، تست کامل است که در آن روند تست به صورت تست ساده بوده با این تفاوت که 3 سری از اندازهگیری ها (هر سری شامل 5 اندازهگیری) انجام شده که فاصله زمانی بین هر سری حداقل 90 دقیقه است. به منظور دستیابی به انحراف استاندارد قابل اطمینان برای تجهیزات مورد استفاده، روش تست کامل اتخاذ میشود. همچنین در روشهای ISO میتوان برای تحلیل بهتر نتایج بدست آمده، از آزمونهای آماری استفاده نمود.
این مقاله برگرفته از ISO 17123 است که روشهای میدانی در ارزیابی دقت (تکرارپذیری) و صحت اندازه گیریهای سیستم ناوبری ماهوارهای جهانی ( GNSS)، شامل جیپیاس(GPS)، گلوناس (GLONASS)، گالیله (GALILEO) و بیدو (BEIDOU) در تعیین موقعیت آنی (RTK) و تجهیزات جانبی آنها را هنگام استفاده در ساختمان، نقشه برداری و اندازه گیری های صنعتی مشخص میکند. در درجه اول، این آزمایشات برای تأیید میدانی سازگاری و درست بودن یک دستگاه خاص برای کاربرد مورد نظر و برآورده کردن الزامات سایر استانداردها در نظر گرفته شده است.
2-اصطلاحات و تعاریف
بهمنظور گردآوری این مقاله، از اصطلاحات و تعاریف ذکر شده در ISO 3534-1 ،ISO 9849 ،ISO 17123-1 ،ISO 17123-2 ،ISO 17123-5 و ISO / IEC Guide 98-3 و ISO / IEC Guide 99 استفاده شده است.
3- کلیات
1-3- مقدمه
روش تعیین موقعیت آنی یک روش اندازهگیری نسبی با استفاده از گیرندههای مرجع (Base) و متحرک (Rover) است. در هنگام استفاده از RTK تحت شبکه، نیازی به داشتن یک گیرنده مرجع جداگانه توسط کاربر نیست، چرا که ایستگاههای شبکه RTK به عنوان گیرنده مرجع، تصحیحات را به Rover ارسال میکنند. هر دو گیرنده مشاهدات را همزمان انجام داده و نتایج آنها از طریق اینترنت با هم ادغام میشود. در نتیجه، گیرنده Rover میتواند مختصات آنی آنتن را در دیتومی مناسب، به عنوان مثال چارچوب مرجع بین المللی زمینی (ITRF) نمایش دهد. در عمل، مختصات حاصل از گیرنده Rover، به مختصات افقی و ارتفاع از سطح بیضوی (مختصات ژئودتیک (WGS84)) تبدیل میشود و از آن پس، فقط این نوع از مختصات به عنوان مشاهدات اصلی مورد استفاده قرار میگیرند.
2-3- الزامات
-قبل از شروع نقشه برداری، این نکته حائز اهمیت است که کاربر میبایست از تجهیزات، گیرنده جی ان اس اس ( GNSS) و آنتن اطمینان حاصل کند که دقت کافی برای این کار را داشته باشد. این تست باید بطور معمول در دفترچه راهنمای مجموعه گیرندههای GNSSو آنتن های شرکت تولید کننده آورده شود. در صورت استفاده از RTK تحت شبکه، باید از استحکام مدلهای آنتن (به عنوان مثال پارامترهای تصحیح آنتن) اطمینان حاصل گردد. -گیرنده، آنتن و تجهیزات جانبی آنها برای نقاط Rover باید مطابق با روشهای مشخص شده در دفترچه راهنما در شرایط قابل قبولی قرار گرفته و برررسی شوند. -کاربر باید دستورالعمل موجود در دفترچه راهنمای مرجع سازنده در زمینه الزامات تعیین موقعیت مانند حداقل تعداد ماهواره ها، آرایش هندسی ماهواره ها (PDOP)، حداقل زمان مشاهده و سایر شرایط پیشنیاز احتمالی را در نظر بگیرد. -همچنین اپراتور باید مرحله راهاندازی اولیه گیرنده را (با خاموش و روشن نمودن) قبل از هر اندازهگیری انجام دهد و پس از رفع ابهام فاز به جمعآوری دادهها بپردازد. در زیر دستورالعمل دقت سانتراژ کردن قابل حصول در انحراف استاندارد بیان شده است: – سانتراژ: 1 میلی متر؛ – اندازهگیری ارتفاع آنتن: 1 میلیمتر؛ نتایج آزمون تحت تأثیر عوامل مختلفی مانند تنظیمات ماهوارهای، شرایط یونیسفر و تروپوسفر، محیط چندمسیری در اطراف نقاط، دقت تجهیزات و کیفیت نرم افزاری مورد استفاده در تجهیزات Rover یا در سیستم ارسال داده ها از Base است. در این بخش از ISO 17123، دو روش میدانی مختلف با عنوان روش تست ساده و روش تست کامل به ترتیب در بخش 4 و 5 توضیح داده شده است. اپراتور باید مناسب ترین روش را متناسب با الزامات پروژه انتخاب کند.
3-3- مفهوم روشهای تست
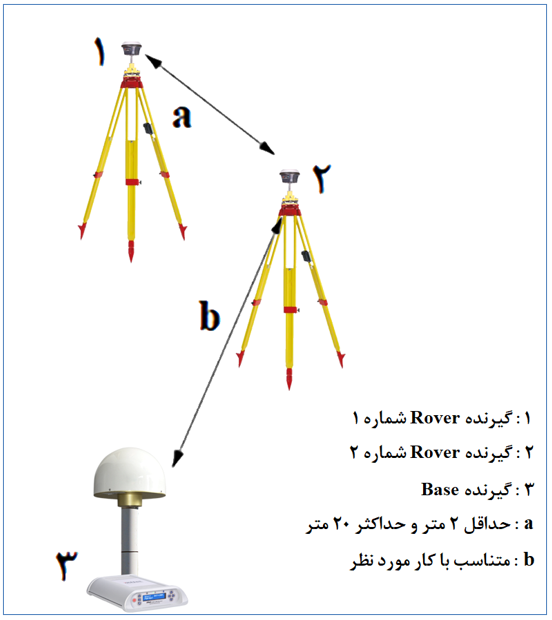
این تست، شامل یک نقطه مرجع (Base) و دو نقطه Rover است. فاصله نقاط Rover باید حداقل 2 متر و حداکثر 20 متر باشد. فاصله افقی و اختلاف ارتفاع بین دو نقطه Rover باید با روشهایی (غیر از RTK) با دقت بهتر از 3 میلیمتر اندازهگیری شود. این مقادیر به عنوان مقادیر اسمی در نظر گرفته شده و در مرحله اول هر دو روش تست مورد استفاده قرار میگیرد. فاصله افقی و اختلاف ارتفاع محاسبه شده در هر مجموعه از اندازه گیری ها، باید با این مقادیر مقایسه شده تا از صحت آنها اطمینان حاصل گردد. با این حال، مقادیر اسمی در آزمون های آماری مورد استفاده قرار نمی گیرد.
شکل 1: پیکربندی شبکه تست میدانی ایزو ISO
نکات
یک سری از اندازه گیری ها شامل 5 مجموعه است که هر مجموعه، اندازه گیری متوالی مختصات در نقاط Rover شماره 1 و 2 را شامل میشود. فاصله زمانی بین مجموعههای متوالی تقریباً 5 دقیقه خواهد بود. در نتیجه یک سری اندازه گیری، حدود 25 دقیقه زمان میبرد و پنج مجموعه اندازه گیری در هر دو نقطه Rover باید از نظر زمانی به طور یکنواخت توزیع شود. به عبارت دیگر هر سری از اندازه گیری ها شامل 5 بار قرائت نقاط Rover با فاصله زمانی 5 دقیقه است. با توجه به این که چرخه تغییرات اثر چندمسیری حدود 20 دقیقه است، در این روند اندازه گیری عمدتاً پوشش داده میشود. با داشتن چندین سری از اندازه گیری ها میتوان تأثیراتی از قبیل تغییر در آرایش هندسی ماهواره ها و تغییرات در شرایط یونسفر و تروپسفر را نیز در تست دخیل نمود. لازم بذکر است که فاصله زمانی بین سریهای متوالی میبایست حداقل 90 دقیقه باشد. انحراف معیار محاسبه شده در تمام اندازه گیری ها، نشاندهنده دقت اندازه گیری در تعیین موقعیت ماهواره ای است. روش تست ساده فقط شامل یک سری اندازهگیری است. بنابراین فقط به تشخیص دادههای خارج از محدوده، بدون ارزیابی آماری میپردازد. در مقابل، روش تست کامل شامل سه سری اندازه گیری است و علاوه بر تشخیص دادههای خارج از محدوده، امکان برآورد انحراف معیار و تستهای آماری را نیز فراهم میکند.
4-3- روش اول: تست ساده
تست ساده شامل یک سری از اندازهگیری ها، مشخص میکند که آیا دقت بدست آمده برای تجهیزات نسبت به یک انحراف استاندارد مشخص مجاز است یا خیر. روش تست ساده بر پایه تعداد محدودی از اندازهگیریها انجام میشود. بنابراین، انحراف استاندارد حاصل از این تست قابلیت اطمینان بالایی نداشته و همچنین در این تست نمیتوان از آزمون های آماری استفاده نمود.
5-3- روش دوم: تست کامل
بهمنظور دست یابی به بهترین دقت اندازه گیری تجهیزات مورد استفاده، روش تست کامل اتخاذ میشود. روش تست کامل شامل سه سری اندازهگیری است. روش تست کامل برای تعیین انحراف استاندارد تجربی برای یک اندازهگیری موقعیت و ارتفاع در نظر گرفته شده است. علاوه بر این، این روش ممکن است برای تعیین موارد زیر نیز استفاده شود: – اندازه گیری دقت تجهیزات در شرایط معین (از جمله تأثیرات کوتاه مدت و طولانی مدت) – اندازه گیری دقت تجهیزات مورد استفاده در دورههای مختلف زمانی یا تحت شرایط مختلف – اندازه گیری قابلیت مقایسه بین دقت مختلف قابل دستیابی برای تجهیزات در شرایط مشابه آزمون های آماری نیز جهت پاسخدهی به سؤالات زیر در این تست به کار برده میشوند: – آیا نمونه حاصل از آزمایش، به همان جمعیتی که انحراف معیار تئوری را ارائه میدهد تعلق دارد؟ – آیا دو نمونه در آزمایشهای مختلف به یک جمعیت تعلق دارند؟
4- روش تست ساده
1-4- اندازه گیریها
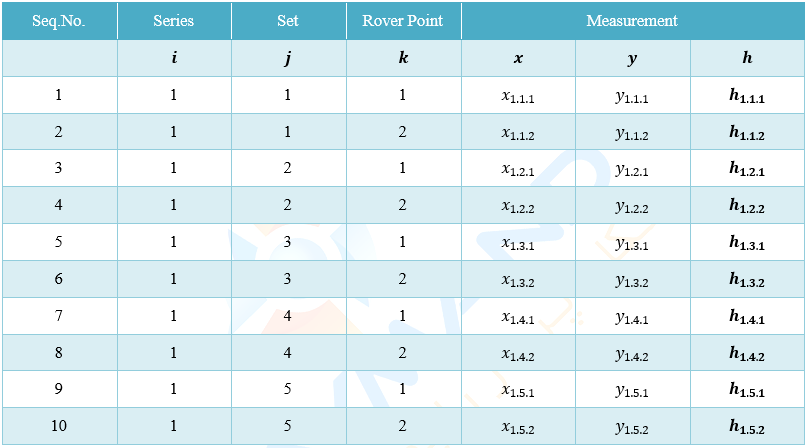
در روش تست ساده، یک سری اندازهگیری انجام میشود و در آن 5 مجموعه اندازهگیری در دو نقطه Rover صورت میگیرد. در جدول 1 اندازهگیریهای متوالی در ستون اول با عنوان “Seq.No.” نمایش داده شده است.
جدول 1: توالی اندازهگیریها برای یک سری
یک مجموعه مشخص از اندازهگیری به صورت xi.j.k و yi.j.k و hi.j.k بیان شده است که y ،x و h مختصات نقاط در یک سیستم مختصات محلی (برای مثال مختصات UTM) هستند. شاخص i شماره سری، j شماره مجموعه و k شماره نقطه Rover است. به عنوان مثال، x1.2.3 معرف مختصات x در مجموعه سوم از سری اول، اندازهگیری شده توسط گیرنده Rover در نقطه 2 است.
2-4- محاسبات
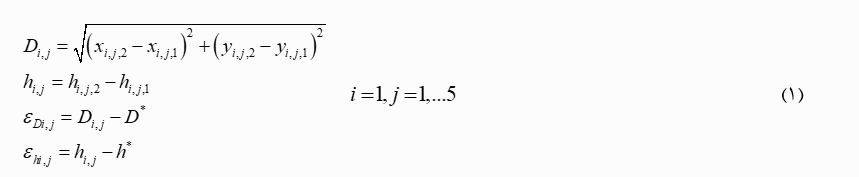
هر اندازهگیری به طور مستقیم با مقادیر اسمی موجود مقایسه میشود تا اندازهگیریهای با خطای بزرگ شناسایی شود. برای هر مجموعه j (1، … ،5) در سری اول، فاصله افقی و اختلاف ارتفاع بین دو نقطه Rover محاسبه میشود. سپس، انحراف استاندارد آنها نسبت به مقادیر اسمی بدست میآید.
xi.j.k و yi.j.k و hi.j.k اندازهگیریهای y ،x و h در مجموعه j، نقطه Rover k در سری i هستند. Di.j و hi.j∆ به ترتیب فاصله افقی و اختلاف ارتفاع محاسبه شده در مجموعه j در سری i است. *D و *h به ترتیب مقادیر اسمی فاصله افقی و اختلاف ارتفاع هستند.
εDi.j و εhi.j به ترتیب انحراف از فاصله افقی و اختلاف ارتفاع است. اگر هر انحرافی نتواند یک از دو شرط فرمول (2) را برآورده کند، وجود یک کمیت اشتباه در دادههای اندازهگیری شده محتمل است و تست باید دوباره تکرار شود.
sx.y و sh انحراف معیار از پیش تعیین شده مطابق روش تست کامل یا مقادیر مشخص شده توسط تولیدکننده هستند.
5-روش تست کامل
1-5- اندازهگیریها
برای روش تست کامل، سه سری اندازهگیری انجام میشود. ترتیب اندازه گیری در هر سری مطابق با تست ساده است. زمان شروع در سریهای متوالی باید با فاصله زمانی حداقل 90 دقیقه انجام شود.
2-5- محاسبات
محاسبات در دو مرحله انجام میشود. در مرحله اول، هر اندازهگیری بهطور مستقیم با مقادیر اسمی موجود مقایسه میگردد تا اندازهگیریهای با خطای بزرگ شناسایی شوند. در مرحله دوم مقادیر آماری محاسبه میشود. کلیه مراحل در ادامه شرح داده شده است.
1-2-5- بررسی اندازهگیری مقدماتی
این بخش مطابق با همان روشی است که در تست ساده (بخش 4-2) توضیح داده شد، بهطوری که برای تمامی اندازهگیریها در هر سه سری انجام میشود.
2-2-5- محاسبه مقادیر آماری
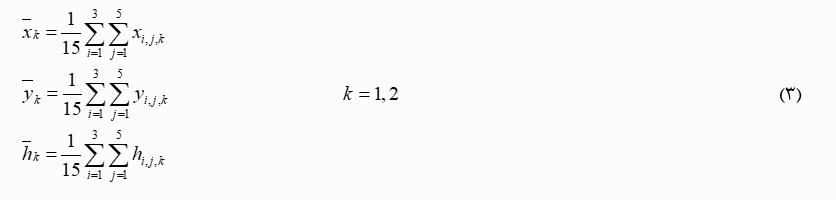
در مرحله اول، سرشکنی کمترین مربعات با تمام اندازهگیریها در کلیه سریها انجام میشود و y ،x و h برای هر نقطه Rover (k=1,2) برآورد میشود:
سپس باقیمانده y ،x و h برای تمام اندازهگیریها در سه سری محاسبه میگردد:
باقیماندههای فوق که شامل اندازهگیریهای k=1 و k=2 برای y ،x و h هستند، بطور جداگانه همه به توان 2 رسیده و با هم جمع میشوند:
درجه آزادی برای y ،x و h یکسان است و به صورت زیر محاسبه میشود:
m تعداد سریها، n تعداد مجموعههای موجود در هر سری و p تعداد گیرندههای Rover است. سرانجام، انحراف معیار تجربی برای هر کمیت y ،x و h به صورت زیر قابل محاسبه است:
بنابراین انحراف معیار تجربی هر موقعیت (x,y) برابر است با:
بدین ترتیب، ما میتوانیم عدم قطعیتهای استاندارد (نوع A) برای یک موقعیت (x,y) و هر ارتفاع را بدین صورت بیان کنیم:
3-5- آزمونهای آماری
آزمونهای آماری فقط برای انجام تست کامل امکانپذیر است. برای تفسیر نتایج، آزمونهای آماری با استفاده از انحراف معیار sx.y و sh حاصل از اندازهگیریها و درجه آزادی مربوط به آنها به منظور پاسخ به سؤالات زیر انجام میشود. آیا انحراف معیار محاسبه شده sx.y، کوچکتر یا برابر با مقدار متناظر اعلام شده توسط سازنده یا مقدار از پیش تعیین شده σx.y است؟ آیا انحراف معیار محاسبه شده sh، کوچکتر یا برابر با مقدار متناظر اعلام شده توسط سازنده یا مقدار از پیش تعیین شده σh است؟ آیا دو انحراف معیار sx.y و s ̃x.y برای هر موقعیت (x,y) حاصل از دو نمونه مختلف اندازهگیری با فرض اینکه هر دو نمونه دارای درجه آزادی یکسان vy + vx و v ̃x+ v ̃y باشند، متعلق به یک جمعیت هستند؟ آیا دو انحراف معیار sh و s ̃h حاصل از دو نمونه مختلف اندازهگیری با فرض اینکه هر دو نمونه دارای درجه آزادی یکسان vh و v ̃h باشند، متعلق به یک جمعیت هستند؟ دو انحراف استاندارد تجربی s و ̃s از طریق روشهای زیر بدست میآید: دو نمونه اندازهگیری با استفاده از تجهیزات مشابه دو نمونه اندازهگیری با استفاده از تجهیزات متفاوت برای تستهای زیر، سطح اطمینان α = 0.95 -1 و درجه آزادی vx+ vy = 56 یا vh = 28 مطابق با اندازهگیریهای ذکر شده در نظر گرفته میشود.
جدول 2: آزمونهای آماری
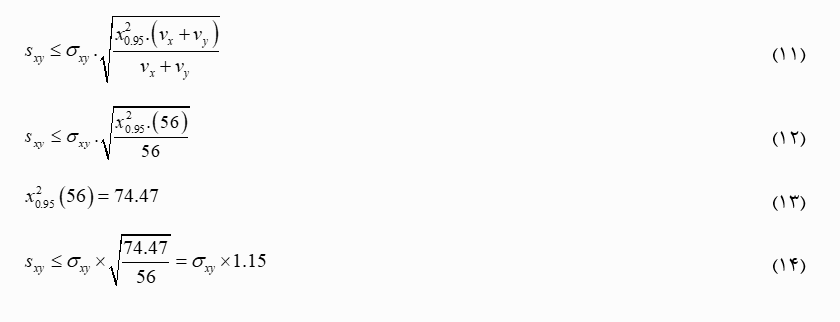
1-3-5- سؤال a
فرض صفر مبنی بر اینکه انحراف معیار sxy محاسبه شده، کوچکتر یا برابر با یک مقدار متناظر اعلام شده توسط سازنده یا یک مقدار از پیش تعیین شده εx.y است، اگر شرایط زیر تحقق یابد رد نمیشود:
در غیر این صورت فرض صفر رد میشود.
2-3-5- سؤال b
فرض صفر مبنی بر اینکه انحراف معیار محاسبهشده sh، کوچکتر یا برابر با یک مقدار متناظر اعلام شده توسط سازنده یا یک مقدار از پیش تعیین شده(σh) است، اگر شرایط زیر تحقق یابد رد نمیشود:
در غیر این صورت فرض صفر رد میشود.
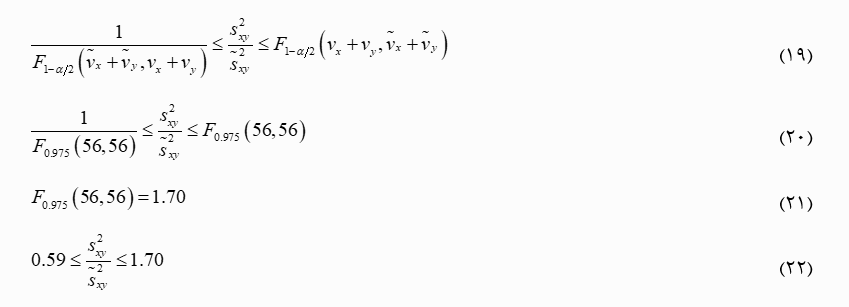
3-3-5- سؤال c
در مورد دو نمونه اندازهگیری مختلف، فرض صفر مبنی بر این که sx.y =s ̃x.y ، اگر شرایط زیر تحقق یابد رد نمیشود:
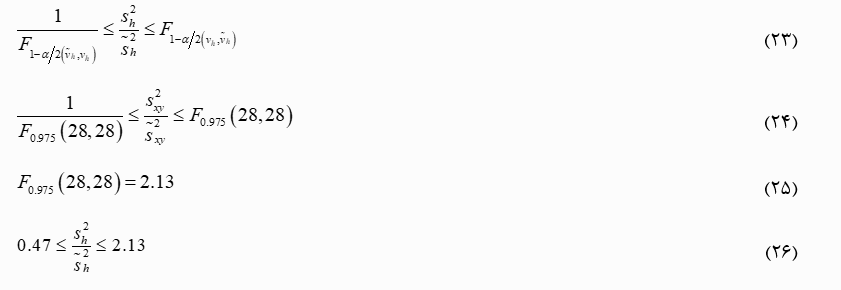
4-3-5- سؤال d
فرض صفر مبنی بر این که دو انحراف معیار sh وs ̃h حاصل از دو نمونه مختلف اندازهگیری، متعلق به یک جمعیت هستند، اگر شرایط زیر تحقق یابد، رد نمیشود:
در غیر این صورت فرض صفر رد میشود.
4-5- ارزیابی عدم اطمینان استاندارد ترکیبی (نوع A و نوع B)
منابع عدم اطمینان (کمیتهای مؤثر) در جدول 3 به عنوان موارد عدم اطمینان بیان شده است:
جدول 3: کمیتهای مؤثر معمول در GNSS (RTK)
عدم اطمینان ترکیبی در سیستم مختصات افقی به صورت زیراست:
ha بیانگر ارتفاع آنتن است. عدم اطمینان ترکیبی در سیستم مختصات عمودی به شرح زیر است:
























سلام ممنون از مقاله خوبتون
ممنونم
خواهش میکنم