تعیین موقعیت RTK (GNSS و GPS) به دو روش RTK کلاسیک (Base و Rover رادیویی) و RTK تحت شبکه رایج است.
چکیده
RTK یک تکنیک تعیین موقعیت دقیق ماهوارهای به صورت آنی با استفاده از یک یا چند ایستگاه مرجع زمینی است. از روش RTK به منظور افزایش دقت مشاهدات حاصل از سیستم ناوبری ماهوارهای جهانی GNSSاستفاده میشود که در آن میتوان به دقت مطلوب در حد سانتیمتر دست یافت. انواع روشهای RTKشامل RTKکلاسیک، RTKنقطهای و RTKشبکهای یا NRTK مطرح است.
در روش RTKکلاسیک، مشاهدات حاصل از حداقل 5 ماهواره GNSS مشترک بین دو گیرنده Base و Rover با قابلیت RTKمورد استفاده قرار میگیرد. گیرنده Rover از طریق ارتباط رادیویی UHF، تصحیحات لازم را از گیرنده Base دریافت میکند. در این روش، دقت مسطحاتی 10mm+1ppm و دقت ارتفاعی 15mm+1ppm است، اما برخلاف روش RTKکلاسیک که بر مبنای ارتباط رادیویی است، در روش RTKتحت شبکه یا NRTK، ارسال تصحیحات از طریق شبکه اینترنت انجام میشود. در این روش گیرنده Base حذف شده و به جای آن، مجموعهای از ایستگاههای دائمی مرجع به نام CORS استفاده میشود. گیرندههای CORS اطلاعات خود را به یک مرکز پردازش داده ارسال نموده و گیرنده Rover با ارسال موقعیت خود به آن (مرکز پردازش داده)، تصحیحات مورد نظر را از طریق شبکه اینترنت دریافت میکند. در این روش جهت محاسبه تصحیحات از الگوریتمهایی مثل VRS ،MAX و FKP استفاده میشود. دقت تعیین موقعیت مسطحاتی و ارتفاعی حاصل از این روش به ترتیب 8mm+1ppm و 15mm+1ppm است.
کلمات کلیدی: RTKکلاسیک، RTKتحت شبکه، ایستگاه Base ،CORS و Rover رادیویی، GNSS RTK ،GPS RTK
1- مقدمه
RTK یک تکنیک تعیین موقعیت دقیق ماهوارهای به صورت آنی با استفاده از یک یا چند ایستگاه مرجع (Base Station) زمینی با هدف تعیین موقعیت نسبی گیرنده متحرک (Rover) است. از روش RTKبه منظور افزایش دقت مشاهدات حاصل از سیستم ناوبری ماهوارهای جهانی( GNSS) شامل جیپیاس (GPS)، گلوناس (GLONASS)، گالیله (GALILEO) و بیدو (BEIDOU) استفاده میشود.
موقعیت ایستگاههای مرجع زمینی، یا مستقیماً توسط متولیان امور نقشهبرداری کشور و یا موقعیت ایستگاه های مرجع زمینی، غالبا توسط متولیان امور نقشه برداری کشور ایجاد میشود (که به این نقاط، نقاط پایهی ژئودزی میگویند) و یا از روی نقاط پایه در منطقهای که حوزه فعالیت نقشهبرداری است، به دست میآید. همچنین از مشاهدات شبه فاصله و فاز موج حامل استفاده میگردد و موقعیت ایستگاههای مرجع زمینی با استفاده از این مشاهدات محاسبه میشود. با مقایسه دو موقعیت به دست آمده، خطاهای موجود در سیگنالهای GNSS مدلسازی شده و تحت عنوان تصحیحات در اختیار گیرنده Rover قرار میگیرند. در این روش خطاهای اتمسفری (یونسفر و تروپسفر)، خطای مداری و خطاهای دیگر با دقت مناسب محاسبه میگردد. ابهام فاز در مشاهدات فاز موج حامل نیز با استفاده از تکنیکهای OTFحل میشود. در روش RTK، از گیرندههای چند فرکانسه (Multi Frequency) استفاده شده و با جمعآوری مشاهدات فاز موج حامل ایستگاه Base و Rover و دریافت تصحیحات، دقت مطلوب در حد سانتیمتر حاصل میگردد.
از جمله کاربردهای روش RTKمیتوان به نقشهبرداری ثبتی و کاداستر، هیدروگرافی، فعالیتهای ساختمانی، ناوبری هواپیماهای بدون سرنشین اشاره کرد. استفاده از گیرندههای GNSS RTKباعث صرفهجویی در زمان، انرژی و هزینه میشود.
روشهای RTKتحت عناوین RTKکلاسیک، RTKنقطهای و RTKشبکهای (NRTK ) است که در ادامه به معرفی دو روش RTKکلاسیک و RTKشبکهای (NRTK) میپردازیم.
2- RTK کلاسیک
در روش RTKکلاسیک، مشاهدات حاصل از حداقل 5 ماهواره جیاناساس GNSSمشترک بین دو گیرنده با قابلیت RTKمورد استفاده قرار میگیرد. یکی از گیرندهها در نقطه معلوم (با مختصات ژئودتیک (WGS84) یا مختصات یو تی ام (UTM)) به عنوان گیرنده Base بوده و گیرنده دیگر به عنوان Rover عملیات برداشت و پیادهسازی را انجام میدهد.
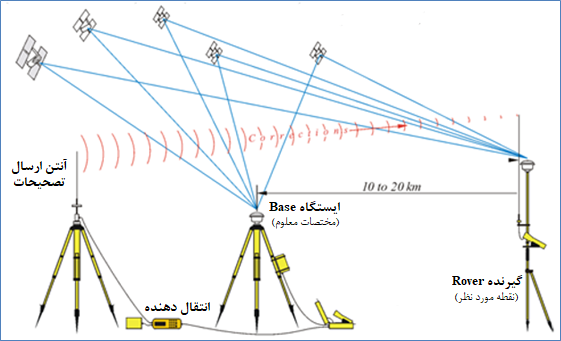
شکل 1: RTK کلاسیک
گیرنده Rover از طریق ارتباط رادیویی UHF با گیرنده Base ارتباط برقرار میکند. از آنجایی که موقعیت Base معلوم است، آنچه از Base به Rover ارسال میشود، مشاهدات Base است. پردازنده روی دستگاه Rover قرار دارد و اطلاعات دریافتی از Base را پردازش نموده و به نقطه مجهول مختصات میدهد. در این روش و در مناطق هموار، فاصله بین Base و Rover بیش از 10 کیلومتر هم میتواند باشد و به دقت مسطحاتی 10mm+1ppm و دقت ارتفاعی 15mm+1ppm میتوان دست یافت[2].
روش RTKکلاسیک محدودیتهایی دارد از جمله اینکه اگر ناهمبستگی مکانی بین Base و Rover هر چه بیشتر باشد، صحت و اعتبار تصحیحات محاسبه شده به ویژه خطاهای یونسفر و تروپسفر کاهش مییابد. از طرفی به دلیل استفاده از ارتباط رادیویی، همواره دید مستقیم ( LOS) بین Base و Rover باید برقرار باشد تا امکان دریافت تصحیحات فراهم گردد. همچنین در فواصل بیش از 20 کیلومتر، حل ابهام فاز با مشکل مواجه میشود. از این رو ایده RTKنقطهای و RTKتحت شبکه مطرح گردید[1].
3- RTK تحت شبکه (NRTK)
تفاوت اصلی RTK تحت شبکه (Network RTK) با RTK کلاسیک در نوع دریافت تصحیحات است. در این روش گیرنده Base حذف شده و به جای آن از مجموعهای از ایستگاههای دائمی مرجع (CORS) استفاده میشود. ابتدا ایده استفاده از یک ایستگاه دائمی مرجع (CORS) با ارتباط اینترنتی با Rover مطرح شد که همان RTK نقطهای نام دارد. در ادامه به منظور اجتناب از به کارگیری تعداد بسیار زیادی از ایستگاههای Single CORS، ایده استفاده از آنها به صورت شبکه مطرح گردید.

شکل 2: RTK تحت شبکه یا NRTK
گیرندههای CORS در نقاطی با مختصات معلوم به صورت 24 ساعته در حال جمعآوری اطلاعات و مشاهده هستند. این گیرندهها اطلاعات خود را برای یک مرکز پردازش داده ارسال میکنند. در نتیجه با توجه به منطقهای که Rover قرار دارد، تصحیحات توسط مرکز پردازش داده (Control Center) با استفاده از شبکه اینترنت برای Rover ارسال میشود. برخی از این تصحیحات از جمله مدل یونسفر و تروپسفر هم میتوانند در مرکز پردازش ذخیره شده و برای پسپردازش (Post Processing) دادههای خام به کار گرفته شوند و یا به صورت آنی در اختیارRover قرار گیرند.
فاصله ایستگاههای مرجع در RTKشبکهای بین 70 تا 150 کیلومتر میتواند باشد. در این روش، تصحیحات توسط الگوریتمهایی نظیر VRS ،MAX ((مقاله مربوط به RTCM و NTRIP را میتوانید در این قسمت ببینید)
)و FKP به محاسبه شده و به Rover ارسال میشود. این الگوریتمها به صورتی هستند که با استفاده از روشهای ریاضی نوین نقشهبرداری، صفحهای از تصحیحات در بین ایستگاههای مرجع برازش داده و از ضریب اطمینان و دقت بالایی برخوردار هستند. دقت تعیین موقعیت مسطحاتی و ارتفاعی حاصل از این روش به ترتیب 8mm+1ppm و 15mm+1ppm است [3].
در ایران نیز شبکههایی از ایستگاههای مرجع دائمی نظیر سامانه شمیم (اداره ثبت و کاداستر کشور)، سامانه هدی (سازمان نقشهبرداری کشور)، سامانه سمت (شهرداری استان تهران)، سامانه مشهد (شهرداری مشهد و حومه) وجود دارد.
جدول 1: مقایسه دو روش RTK کلاسیک و RTK تحت شبکه

4- منابع












