بنظر می رسد بهترین شروع برای این مبحث، معرفی چند اصطلاح از اصطلاحات موجود در RTK تحت شبکه باشد.
💎 اصطلاح NTRIP به چه معناست؟
برای رسیدن به یک تعیین موقعیت RTK دقیق، معمولا به یک گیرنده Rover و یک گیرنده base که تصحیحات را بصورت آنی ارسال نماید، احتیاج است. که این تصحیحات می تواند توسط گیرنده base تعبیه شده توسط شما و یا از طریق یک گیرنده بیس در دوردست و با استفاده از تکنولوژی NTRIP ارسال شود.
NTRIP مخفف عبارت Networked Transport of RTCM via Internet Protocol بوده و یک پروتکل برای حمل و نقل داده های GPS تفاضلی (DGPS) است. این پروتکل به گیرنده جی پی اس یا جی ان اس اس روور شما اجازه دریافت تصحیحات در بستر اینترنت، بدون نیاز به یک مجموعه محلی از گیرنده های بیس، را می دهد. NTRIP یک پروتکل عمومی مبتنی بر انتقال فرامتنی HTTP/1.1 است و برای حمل و نقل داده GNSS توسعه یافته است.
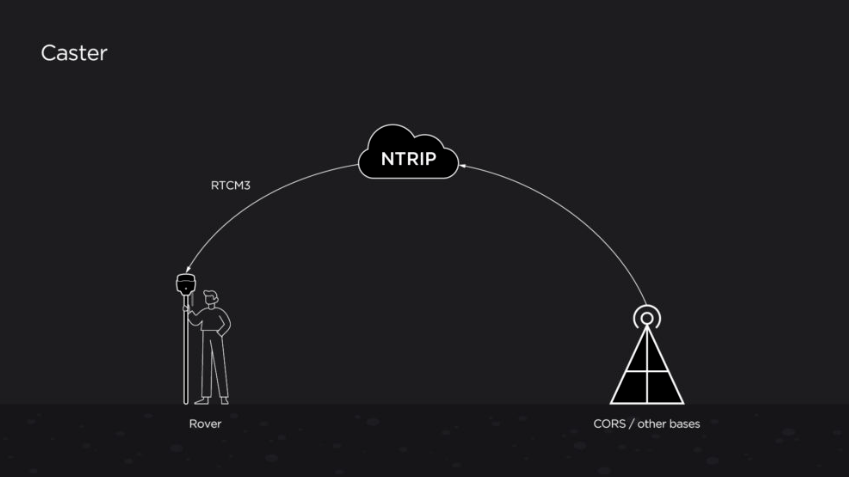
NTRIP شامل سه مولفه اصلی BASE، CASTER و گیرنده های Rover است، معمولا ایستگاه های Base در اینجا CORS هستند. داده های جمع آوری شده توسط CORS به کستر NTRIP ارسال می شود، جایی که اطلاعات در بستر اینترنت به roverهای متصل شده در پورت های بخصوص و مجاز، ارسال می شوند.
شکل1: روش کار NTRIP
شما در هنگام استفاده از NTRIP، تمام تصحیحات تولید شده را از طریق مودم سلولار (سیم کارت) موجود در گیرنده خود و یا سیمکارت کنترلر متصل شده از طریق ارتباط بلوتوثی به گیرنده جی پی اس یا جی ان اس اس خود دریافت می کنید.
♦️ چطور از NTRIP استفاده کنیم؟
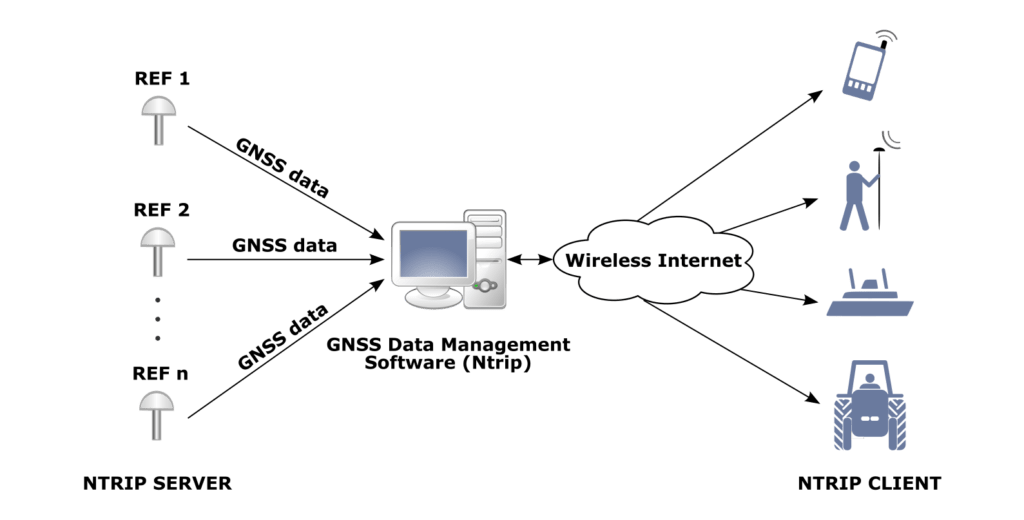
برای دسترسی به تصحیحات هر شبکه NTRIP باید در سرویس NTRIP مورد نظر حساب کاربری ایجاد کرد. (جهت آموزش ایجاد حساب کاربری در سامانه شمیم پلاس، سامانه شمیم و سامانه سحاب بر روی سامانه مورد نظر کلیک نمایید.) هر سامانه یک پورت و آدرس IP اختصاصی برای دسترسی و دریافت مجوز استفاده توسط شبکه دارد و برای ورود به هر شبکه به یک نام کاربری و رمز عبور نیاز است.
شکل2: فرایند استفاده از اطلاعات NTRIP
💎 اصطلاح Mount Point به چه معناست؟
پس از برقراری ارتباط گیرنده GPS یا GNSS با شبکه NRTK، جدولی ظاهر می شود که منابع ایجاد شده از تصحیحات (در ادامه در مورد این منابع توضیح خواهیم داد.) در سرور را نشان می دهد که به آنها “Mount Point” گفته می شود.
تصحیحات لازم برای تعیین موقعیت NRTK هر نقطه، به روش های مختلفی تولید می شود که در ادامه در مورد آن ها بحث خواهیم کرد. هرکدام از این روش ها در یک دسته بندی با نام Mount point قرار میگیرند. در واقع شما با استفاده از انتخاب Mount point موردنظرتان، انتخاب می کنید که تصحیحات ارائه شده جهت اعمال به سیگنال دریافتی با چه الگوریتمی محاسبه شده باشد.
در واقع MountPoint (یا «نقطه اتصال») مشخصاتی است که توسط آن، یک کاربر NTRIP به یک جریان داده در NTRIP Caster متصل می شود.
💎 اصطلاح NTRIP Caster به چه معناست؟
کستر NTRIP اساساً یک سرور آنلاین است که برای انتقال داده های تصحیحاتی تولید شده توسط ایستگاه های مرجع، جهت تصحیح سیگنال ارسالی از سمت ماهواره های GNSS به گیرنده rover جی پی اس یا جی ان اس اس استفاده می شود.
چنانکه در مقالات مقایسه روش RTK کلاسیک و NRTK و ایستگاه های Cors اشاره شد، تصحیحات موردنیاز گیرنده تعیین موقعیت Rover در حالت NRTK با استفاده از مجموعه ای از ایستگاه های CORS با استفاده از یک الگوریتم خاص تولید شده و به فراخور هدف نقشه بردار در فرمت های متفاوتی در اختیار گیرنده GPS یا GNSS قرار میگیرد. اما مفهوم این الگوریتم ها چیست؟ و استفاده از کدام یک آنها در شرایط فعلی ما بهتر است؟
اگر مایلید با انواع mount point های موجود در تعیین موقعیت NRTK بیشتر آشنا شوید و بدانید بهتر است در پروژه خود از کدام یک از الگوریتم های ارسال تصحیحات استفاده کنید، با ما همراه باشید.
🔹 انواع الگوریتم ارسال تصحیحات NRTK
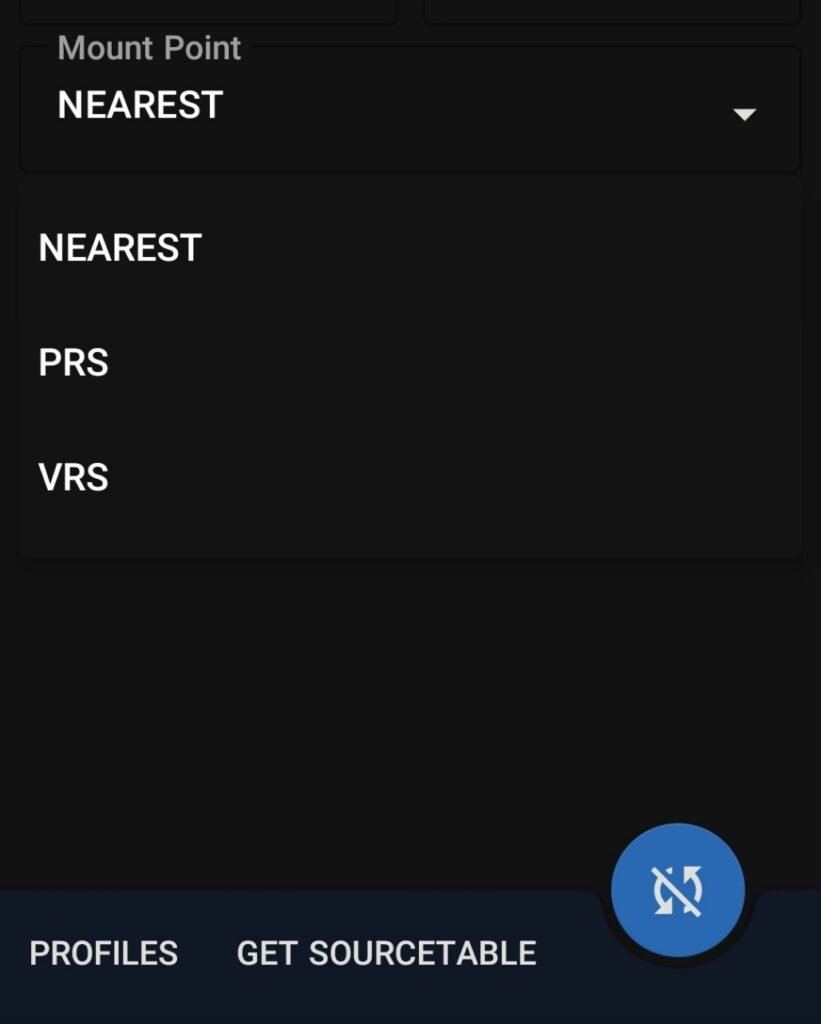
معمولاً Casterها، داده ها و تصحیحات را با استفاده از فرمت های RTCM 2.x، RTCM 3.x، CMR یا/و CMR+ ارائه می کنند و کاربران می توانند در بستر اینترنت و از طریق کستر NTRIP با استفاده از مودم های اینترنتی به Mount Pointها دسترسی داشته باشند. در NTRIP، روش های انتقال داده (Mount Point) شامل Max، iMax، Nearest، VRS و (حتی) چند نوع جریان های داده محلی و اختصاصی مربوط با NTRIP مورد استفاده است.
شکل3: Mountpointهای سامانه شمیم پلاس در نرم افزار RaySurvey
در نرم افزار RaySurvey ( که جهت انجام پروژه های نقشه برداری با استفاده از گیرنده های رایمند با چند نمونه از Mount Pointها که در زیر به آن اشاره خواهیم کرد، روبرو هستیم:
💎 ایستگاه مرجع مجازی یا VRS(Virtual Reference Station)
در صورتی که از NTRIP استفاده می کنید، استفاده از الگوریتم VRS برای دریافت تصحیحات اینترنتی بسیار با ارزش خواهد بود. VRS یا ایستگاه مجازی، الگوریتمی مفید برای بیس لاین های طولانی است.
تراکم وجود ایستگاه های CORS در یک شبکه می تواند از محیطی به محیط دیگر متفاوت باشد. اگر مطمئن هستید تراکم ایستگاه ها در شبکه مورد استفاده اتان کافی است، ولی محل استقرار گیرنده GPS روور شما از هر یک از آن ها خیلی دور است، الگوریتم VRS برای حذف اثر بیس لاین (که خود باعث مقداری خطا خواهد شد) بسیار مفید خواهد بود.
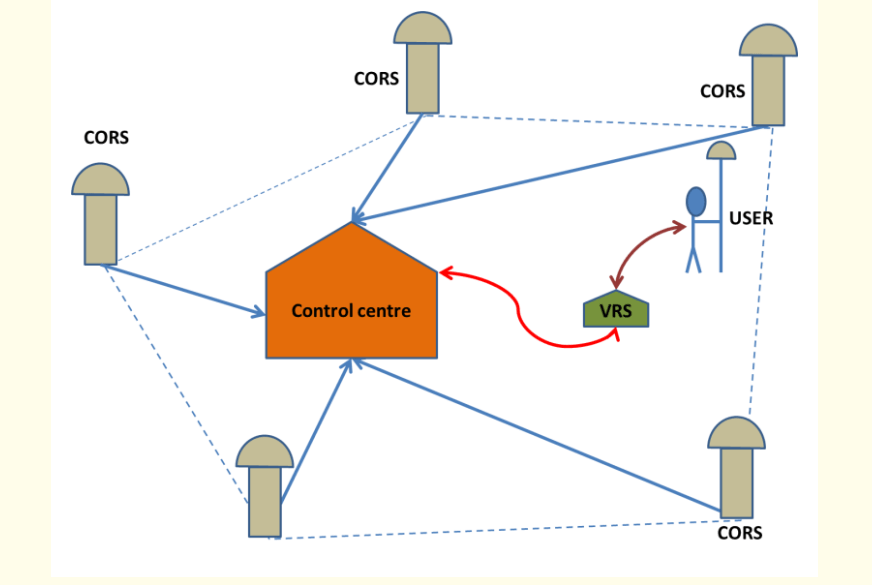
شبکه گیرنده های مرجع، به یک مرکز محاسبات مرتبط است. هر ایستگاه (حداقل سه ایستگاه در شبکه) داده های خام خود را برای کمک به ایجاد مدل های خطا (خطاهای اتمسفری، ساعت و…) که وابسته به فاصله در سطح شبکه هستند، ارائه می کند. محاسبه خطاها بر اساس اندازه گیری های فاز حامل شبکه قبل از هر چیز شامل حل ابهامات فاز حامل است و نیاز به آگاهی از موقعیت های دقیق ایستگاه مرجع دارد. به محض حل ابهام فاز، مدلسازی آغاز خواهدشد.
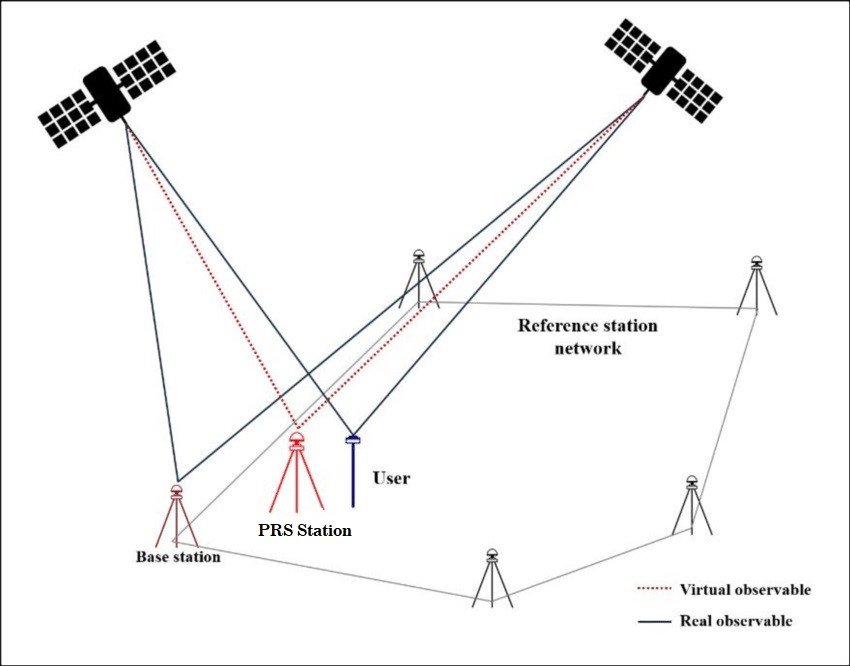
شکل4: سازوکار الگوریتم VRS
گیرنده روور GNSS یا GPS موقعیت تقریبی خود را محاسبه می کند و این اطلاعات را از طریق GSM یا GPRS و با فرمت استاندارد NMEA به سرور محاسباتی، منتقل می کند. مرکز محاسبات نیز بصورت آنی یک ایستگاه مرجع مجازی در موقعیت اولیه ایستگاه گیرنده روور GPS یا GNSS یا خیلی نزدیک به آن ایجاد می کند. (بنابراین در الگوریتم VRS همیشه یک ارتباط دو طرفه بین گیرنده rover و مرکز پردازش برقرار است و اگر فاصله بین ایستگاه مجازی ایجاد شده و محل فعلی گیرنده روور از یک حدآستانه تعریف شده بیشتر شود، یک ایستگاه مجازی جدید نزدیک به ایستگاه rover فعلی ایجاد خواهد شد.) این کار با انتقال هندسی شبه فاصله و داده های فاز حامل از نزدیک ترین ایستگاه مرجع به مکان ایستگاه مجازی ایجاد شده و سپس اضافه کردن خطاهای درون یابی از مدل های خطای شبکه، انجام می شود.
سپس داده های ایجاد شده VRS از طریق یک اتصال بی سیم و اغلب با استفاده از پروتکل NTRIP به کاربر ارسال می شود. این الگوریتم در نهایت درست مثل اینکه دادههای VRS از یک ایستگاه مرجع فیزیکی آمده باشند، عمل خواهدکرد. گیرنده Rover از الگوریتم های استاندارد تک بیس لاینی برای تعیین مختصات گیرنده جی پی اس یا جی ان اس اس کاربر، در حالتهای کینماتیک یا پس پردازش استفاده میکند.
♦️ در چه مواردی استفاده از الگوریتم VRS پیشنهاد می شود؟
فرض کنید که در محلی قرار دارید که گیرنده Rover شما با نزدیک ترین ایستگاه CORS به اندازه 50 کیلومتر فاصله دارد. زمانی که در حال تعیین موقعیت RTK با استفاده از یکی از سامانه های تعیین موقعیت مثل شمیم، شمیم پلاس یا سحاب هستید این طول بیس لاین، فاصله بسیار طولانی ای است و باعث خطای تعیین موقعیت بسیار بزرگی خواهد شد. در این صورت باید چه کار کرد؟
هدف اصلی ایجاد یک ایستگاه VRS کاهش فاصله بیس لاین گیرنده GNSS روور و ایستگاه مرجع به منظور حذف موثر همبستگی خطاهای وابسته به فاصله با استفاده از پردازش تفاضلی، و مقابله با خطاهای تصحیحاتی ایجاد شده توسط شبکه CORS است.
بنابراین انتخاب الگوریتم VRS در طول بیس لاین های بلند، با ایجاد یک ایستگاه مجازی در موقعیت گیرنده روور شما یا در فاصله بسیار نزدیک به آن باعث خواهد شد تا فاصله بیس لاین نزدیک به صفر شود و این به شما کمک خواهد کرد تا در تعیین موقعیت نقاط از خطاهای احتمالی مرتبط با فاصله بیس لاین در امان بمانید.
♦️ مزایا و معایب الگوریتم VRS چیست؟
پروتکل RTCM 3.x قادر به پشتیبانی از تصحیح VRS است همچنین بعضی از پیغام هایRTMC 2.x نیز از این الگوریتم پشتیبانی می کنند به همین دلیل با استفاده از انواع گیرنده های تعیین موقعیت جی پی اس یا جی ان اس اس تک فرکانسه، جی پی اس دوفرکانسه یا GPS مولتی فرکانس قادر خواهند بود تا با استفاده از این الگوریتم و با فرمت NMEA به داده های NRTK دسترسی پیدا کنند.
زمانی که محل قرار گیری گیرنده تعیین موقعیت rover تغییر کند یک موقعیت جدید برای VRS ایجاد می شود، بنابراین گیرنده روور باید دوباره مقدار دهی اولیه را تکرار کند تا ابهام فاز جدید رفع شود.
از آنجایی که VRS یک سیستم ارتباطی دوطرفه است، تنها در تعیین موقعیت NRTK و از طریق ارتباط NTRIP قابل انجام است به همین دلیل همواره به ارتباط اینترنتی قوی احتیاج است.
💎 ایستگاه شبه مرجع یا PRS (Pseudo Reference Station)
ایستگاه شبه مرجع، در واقع یک ایستگاه مجازی اصلاح شده (modified) است که توسط کمپانی Geo++ معرفی و در GNSMART پیاده سازی شده است.در این الگوریتم، مشاهدات ایستگاه مرجع و پارامترهای وضعیت درست مانند روش VRS به موقعیتی نزدیک به موقعیت کاربر تبدیل می شوند و یک تصحیح بهینه بر پایه ی مشاهدات برای گیرنده ارائه می شود. بعلاوه در روش PRS، موقعیت ایستگاه مجازی ایجاد شده در یک فاصله مشخص (مثلا 5 کیلومتر) از موقعیت تقریبی گیرنده خواهدبود. یعنی ایستگاه مرجع مجازی همیشه در یک فاصله ثابت از پیش تعریف شده از موقعیت روور قرار می گیرد. بعلاوه تصحیحات شبکه RTK ایجاد شده برای موقعیت فعلی گیرنده روور (آخرین موقعیت معلوم) همیشه منحصر بفرد هستند. این امر از افزایش خطا با افزایش فاصله برای یک گیرنده rover جی پی اس یا جی ان اس اس متحرک جلوگیری می کند و امکان حرکت را در استفاده از گیرنده جی پی اس یا جی ان اس اس فعال می کند.
در این روش بجای استفاده از موقعیت های منحصر بفرد کاربران، موقعیت پایدار از پیش تعریف شده گیرنده برای محاسبه داده تصحیح استفاده میشود، این را می توان برای تعدادی از موقعیت های از پیش تعریف شده که در شبکه مرتب شده اند انجام داد که معادل همان روش VRS است. در واقع روش تصحیح مانند آنچه در بالا برای VRS توضیح داده شد کار می کند.
شکل5: سازوکار الگوریتم PRS
مقایسه روش PRS و VRS در ارسال تصحیحات NRTK
گفته شد که روش PRS تقریبا مشابه با روش VRS عمل میکند، اما چه چیزی باعث خواهدشد تا این روش را بجای VRS انتخاب کنیم؟
در این روش، الگوریتم مورد استفاده در ایجاد تصحیحات RTK مورد نیاز گیرنده روور، انتظار وجود برخی از خطاهای وابسته به فاصله را دارد و بنابراین قادر به مدل سازی خطاهای باقی مانده است.
PRS در عمل و در بررسی های عملی، عملکرد تعیین موقعیت بسیار بهتری از VRS را نمایش می دهد.
عملکردهای حرکتی (حرکت در حین تعیین موقعیت) در این روش ممکن است. چون تصحیحات OSR همیشه برای موقعیت روور بهینه سازی شده است.
💎 روش مفهوم اصلی-کمکی یا MAX (Master Auxiliary Correction)
تصحیحات در MAX شامل تصحیحات ایجاد شده توسط الگوریتم MACاست. (برای مطالعه بیشتر در مورد الگوریتم MAC به مقاله ” معرفی الگوریتمهای VRS و MAC ” رجوع کنید.)
درونیابی تصحیحات شبکه توسط گیرنده جی ان اس اس با استفاده از اطلاعات کامل شبکه انجام می شود اما این نوع از تصحیحات فقط برای گیرنده هایی که از پیام های شبکه RTCM 3.1 پشتیبانی می کنند قابل دریافت است. این روش، از اختلاف تصحیح فاز یک ایستگاه CORS اصلی با چندین ایستگاه CORS کمکی استفاده می کند. معمولاً گیرنده GPS یا GNSS موقعیت خود را به سرور مرکزی می فرستد و سرور، نزدیکترین ایستگاه بعدی موجود در شبکه را به عنوان ایستگاه اصلی CORS تعیین می کند. (که این باعث خواهد شد تا در صورت غیرفعال بودن یکی از ایستگاه ها، ایستگاه بعدی مورد استفاده قرار بگیرد و فاصله بیس لاین بیشتر شود.)
سپس اختلاف مختصات و اختلاف تصحیح هندسی/یونوسفری بین ایستگاه های اصلی و کمکی به گیرنده جی پی اس ارسال میشود. محاسبه و تنظیم دادههای تصحیح نهایی (بصورت منحصربفرد) در گیرنده روور انجام میشود که به نرمافزار (الگوریتم) و منابع پردازش (CPU) اضافی نیاز دارد. محدوده اعتبار نتایج حاصل از MAC معمولا محدوده تحت پوشش ایستگاه اصلی و کلیه ایستگاه های کمکی است.
این روش از خروجی ایستگاه اصلی استفاده میکند (که در مقایسه با یک گیرنده مرجع تنها (StandAlone) تغییری ندارد) و اطلاعات مربوط به تغییرات مکانی تصحیحات را به این خروجی اضافه میکند. MAC تغییرات مکانی برای نقاط مجزا را ارسال میکند.
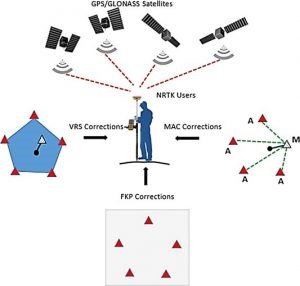
شکل6: سازوکار الگوریتم MAC
مقایسه روش MAX و VRS/PRS در ارسال تصحیحات NRTK
یکی از تمایزات اصلی موجود بین MAC و VRS/PRS مکانی است که دادههای تصحیح در آن بصورت منحصر بفرد محاسبه و به موقعیت اعمال می شوند.
تجزیه و اعمال تصحیحات موقعیت کاربر در الگوریتم VRS/PRS در سرور مرکزی و برای مکانی نزدیک به موقعیت واقعی گیرنده rover محاسبه میشود که توسط ارائهدهنده اطلاعات تصحیحاتی ارائه می شود. اما در الگوریتم MAC این فرایند باید توسط خود گیرنده روور در یک روند درونیابی و سرشکنی انجام شود که نیاز به وجود الگوریتم ها و منابع مخصوصی در گیرنده روور دارد.
روش خاصی برای اعمال تصحیحات ایجاد شده در روش MAC به موقعیت نهایی وجود ندارد و انجام این فرایند درون گیرنده rover می تواند وابسته به شرکت تولید کننده آن باشد. اما برای VRS/PRS محاسبات همیشه یکسان و بر اساس فرمول هایی است که برای همه گیرنده های GPS و GNSS استفاده می شود.
MAC به دلیل انتقال داده های چندین ایستگاه به پهنای باند بیشتری در مقایسه با روش VRS/PRS نیاز دارد اما در عوض با استفاده از الگوریتم MAC و در مفهوم تئوری، افزونگی بیشتری را شاهد هستیم.
بطور کلی دقت قابل حصول با استفاده از الگوریتم های MAC و VRS باید باهم یکسان باشند.
VRS/PRS با RTCM2 و RTCM3 امکان پذیر است اما MAC فقط از RTCM3 پشتیبانی میکند.
این تصحیحات به جهت استفاده گیرنده های جی ان اس اس قدیمی تر که قادر به دریافت و تفسیر پیغام های RTCM 3.1 نیستند تولید می شوند.
این تصحیحات نیاز به ارتباط دو طرفه بین گیرنده مرجع و گیرنده Rover دارند تا سرور شبکه بتواند مقادیر صحیح درونیابی تصحیحات را برای گیرنده روور محاسبه کند. (درونیابی این تصحیحات بر همان اساس الگوریتم های موجود در روش MAX است)
در واقع مراحل اصلی کار در استفاده از i-MAX مشابه MAX است، با این تفاوت که سرور شبکه تصحیحات NRTK را برای گیرنده محاسبه کرده و آنها را در ایستگاه اصلی CORS اعمال می کند. واضح است که i-MAX تقریباً مشابه VRS عمل میکند، بنابراین بسیاری از چالش های موجود در الگوریتم VRS را خواهد داشت.
مقایسه روش i-MAX و VRS/PRS در ارسال تصحیحات NRTK
i-MAX همیشه از یک ایستگاه مرجع فیزیکی استفاده میکند و نه مجازی (مانند VRS)، که سازگاری و قابلیت ردیابی را برای تصحیحات دریافت شده توسط روور ممکن میسازد.
اگر ایستگاه های مرجع تقریباً 70 کیلومتر از هم فاصله داشته باشند، بیس لاین های 40 کیلومتر یا بیشتر وجود خواهد داشت که ممکن است برخی از گیرنده های جی پی اس یا جی ان اس اس قدیمی با استفاده از این روش، قابلیت دستیابی به ابهام صحیح با روش i-MAX را نداشته باشند.
💎 NEAREST
این الگوریتم، معمولا پر طرفدار ترین الگوریتم در بین کاربران استفاده کننده از تصحیحات ارسالی توسط سامانه های ارسال تصحیحات است. در این الگوریتم، گیرنده روور با ارسال موقعیت خود به Caster به سرور کمک میکند تا نزدیکترین (بهترین) گیرنده CORS به گیرنده روور را انتخاب کند. از آنجا که تصحیحات اتمسفری (مثل یونسفر و تروپسفر) در این شرایط به دلیل نزدیکی دو گیرنده Base و Rover (معمولا تصحیحات اتمسفری در سطح فاصله بین این دو گیرنده GPS/GNSS به راحتی مدل و تعدیل میشوند.) برای هر دو گیرنده یکسان است و این خطاها به راحتی قابل تعدیل و حذف است، در نتیجه بهترین تصحیحات برای اعمال به گیرنده روور در این شرایط انتخاب می شود. (تصحیحات الگوریتم NEAREST برای تمام گیرنده هایی که در نزدیکی ایستگاه CORS منتخب قرار دارند یکسان است.)
به طور کلی فرض بر این است که چنین عملکردی به طور دوره ای نتایج ارسال شده را مجدداً ارزیابی می کند. این بدان معنی است که کاربر در حال حرکت می تواند مطمئن باشد که همیشه بهترین داده ها (بهترین اتصال) را با متناسب با تغییر مکان دریافت می کند.
البته اگر در لحظه تعیین موقعیت به هر دلیلی نزدیکترین گیرنده CORS به گیرنده روور در دسترس نباشد (مثلا نزدیکترین گیرنده CORS در آن لحظه قادر به ارسال تصحیحات موردنیاز شبکه نباشد.) سرور شبکه نزدیکترین گیرنده CORS بعدی به گیرنده ROVER را انتخاب میکند.
🔹 پسوندهای -GG، -GGB، -GGBG در الگوریتم های ارسال تصحیحات به چه معناست؟
جهت تصحیح خطاهای موجود در تعیین موقعیت یک نقطه، در استفاده از سامانه های NRTK در واقع یک الگوریتم تفاضلی DGNSS بین دو (چند ایستگاه) برقرار میشود. برای برقراری این الگوریتم تفاضلی لازم است تا گیرنده بیس و گیرنده روور همزمان تعداد مشترکی از ماهواره های GNSS را مشاهده کنند.
همانطور که در مقاله معرفی سامانه GNSS اشاره شد، ماهواره های سامانه GNSS در 4 دسته بندی GPS، GLONASS، GALILEOو BeiDou دسته بندی می شوند. از آنجایی که برای تولید تصحیحات از این ماهواره ها استفاده می شود؛ شما با انتخاب یکی از پسوندهای -GG، -GGB، -GGBG انتخاب می کنید که تصحیحات تولیدی با استفاده از اطلاعات گسیل شده از کدام یک از سیستمهای تعیین موقعیت ماهواره های در دید گیرنده GNSS استفاده کند.
-GG فقط از گلوناس و جی پی اس برای تولید تصحیحات استفاده می شود.
-GGB از جی پی اس، گلوناس و بیدو جهت تولید تصحیحات RTK استفاده می شود.
-GGBG زمانی که این شیوه استفاده می شود از تصحیحات تولید شده توسط هر 4سامانه GPS، GLONASS، GALILEO و BeiDou برای حل خطاها و تصحیح موقعیت محاسبه شده استفاده می شود.
🔹 جمع بندی
الگوریتم NEAREST از نزدیکترین ایستگاه مرجع موجود در شبکه برای تصحیح و حل خطاهای موجود در تعیین موقعیت استفاده می کند، در واقع این الگوریتم بر اساس موقعیت ارسال شده توسط گیرنده جی پی اس Rover به شبکه است که نزدیکترین ایستگاه مرجع به گیرنده تعیین موقعیت Rover جهت دریافت تصحیحات انتخاب می شود.
دو الگوریتم MAX و iMAX از شبکه ای از ایستگاه های مرجع و موقعیت تولید شده اولیه توسط گیرنده روور برای ایجاد راه حل ها و تصحیحات مناسب استفاده می کنند. تفاوت این دو روش در این است که در الگوریتم MAX تمام داده ها به گیرنده Rover ارسال شده و تصحیحات در همان گیرنده Rover به داده ها اعمال می شود ولی در الگوریتم iMAX، تصحیحات در سرور شبکه اتفاق می افتد و در همان ایستگاه اصلی به موقعیت اعمال می شود.
الگوریتم VRS به طول و عرض جغرافیایی ارسال شده از سمت گیرنده روور احتیاج دارد تا یک ایستگاه مجازی نزدیک گیرنده جی پی اس یا جی ان اس اس ایجاد کند و برای تصحیحات از آن استفاده کند.
MountPoint (یا «نقطه اتصال») مشخصاتی است که توسط آن، یک کاربر NTRIP به یک جریان داده در NTRIP Caster متصل می شود.
مزیت الگوریتم PRS نسبت به VRS چیست؟
در روش PRS، موقعیت ایستگاه مجازی ایجاد شده در یک فاصله مشخص (مثلا 5 کیلومتر) از موقعیت تقریبی گیرنده خواهدبود بنابراین عملکردهای حرکتی (حرکت در حین تعیین موقعیت) در این روش ممکن است. چون تصحیحات OSR همیشه برای موقعیت روور بهینه سازی شده است.
الگوریتمهای Max و i-Max چه تفاوتی باهم دارند؟
تصحیحات Max برای گیرنده هایی که از پیام های شبکه RTCM 3.1 پشتیبانی می کنند قابل دریافت است اما برای دستیابی گیرندههای قدیمیتر به تصحیحات محاسبه شده توسط الگوریتم Mac یک Mount Point با نام i-Max استفاده می شود.
یک پاسخ به “نقاط قوت و ضعف انواع الگوریتمهای ارسال تصحیحات NRTK در شرایط مختلف”












دیدگاه😊