در RTK تحت شبکه، از روشهایی نظیر VRS ،MAC و i-MAX جهت محاسبه تصحیحات و ارسال به Rover استفاده میشود.
چکیده
در روش RTK تحت شبکه vrs vrs vrs مجموعهای از ایستگاههای دائمی مرجع به نام CORSاستفاده میشود. با توجه به منطقهای که Rover قرار دارد، تصحیحات تعیین موقعیت مانند مدل یونسفر، مدل تروپسفر و خطای مداری توسط مرکز پردازش داده با استفاده از الگوریتمهایی مانند VRSو یا MAC محاسبه شده و برای Rover ارسال میگردد.
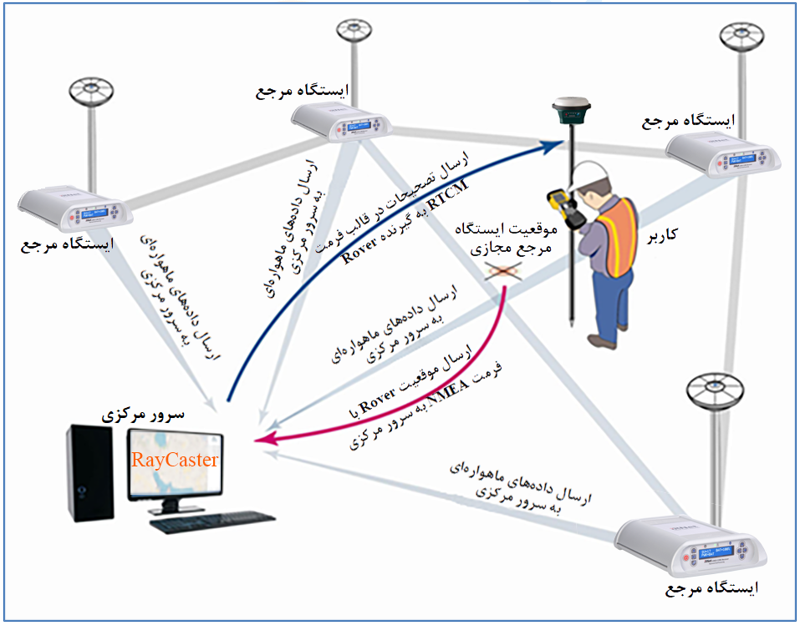
در روشVRS، یک ایستگاه مرجع مجازی توسط مرکز پردازش در فاصله چند متری از Rover برای محاسبه تصحیحات مشاهدات ایجاد میشود. به منظور تعیین موقعیت ایستگاه مرجع مجازی، یک ارتباط دو طرفه بین گیرنده Rover و مرکز پردازش با هدف انجام محاسبات برقرار میگردد. تصحیحات با استفاده از فرمت RTCMو از طریق پروتکل NTRIP توسط مرکز پردازش به گیرنده Rover ارسال شده و موقعیت Rover با دقت سانتیمتر قابل دسترس است.
روشMACبعد از VRSارائه شده و شامل یک ایستگاه اصلی و تعدادی ایستگاه دائمی مرجع CORSاست. در مرکز پردازش، با توجه به تعداد ماهوارههای GNSS و با استفاده از تصحیحات حداقل 5 ایستگاه دائمی مرجع CORSنزدیک به گیرنده Rover، یک سلول ایجاد شده و از آن بهمنظور ارسال تصحیحات برای کاربر در محل گیرنده Rover استفاده میشود. در این روش، برای گیرندههایی که قادر به دریافت تصحیحات با فرمت RTCM 3.0 نیستند، تصحیحات i-Max طراحی شده است. روند پردازش آن مانند VRS است با این تفاوت که در آن از ایستگاه مجازی استفاده نشده و امکان پیگیری و ردیابی تصحیحات دریافت شده توسط Rover وجود دارد.
RTKیک تکنیک تعیین موقعیت دقیق ماهوارهای به صورت آنی با استفاده از یک یا چند ایستگاه مرجع زمینی (Base Station) با هدف تعیین موقعیت نسبی گیرنده متحرک (Rover) است. از روش RTKبه منظور افزایش دقت مشاهدات حاصل از سیستم تعیین موقعیت و ناوبری ماهوارهای جیاناساس (GNSS) شامل ماهوارههای جیپیاس (GPS)، گلوناس (GLONASS)، گالیله (GALILEO) و بیدو (BEIDOU) استفاده میشود. در این روش تعیین موقعیت، به صورت آنی میتوان به دقت سانتیمتر رسید. GNSS RTKشامل سه روش RTKکلاسیک، RTKنقطهای و RTKشبکهای رایج است.
در روش RTK تحت شبکه، مجموعهای از ایستگاههای دائمی مرجع به نام CORS استفاده میشود. این گیرندهها در نقاطی با مختصات معلوم (مختصات ژئودتیک (wgs84) یا مختصات یو تی ام (UTM)) به صورت 24 ساعته در حال جمعآوری اطلاعات و مشاهده بوده و اطلاعات خود را برای یک مرکز پردازش داده ارسال میکنند. در نتیجه با توجه به منطقهای که Rover قرار دارد، تصحیحات تعیین موقعیت مانند مدل یونسفر، مدل تروپسفر و خطای مداری توسط مرکز پردازش داده با استفاده از الگوریتمهایی مانند VRSیا MAC محاسبه شده و برای Rover ارسال میگردد. برخی از این تصحیحات از جمله مدل یونسفر و تروپسفر میتوانند در مرکز پردازش ذخیره شده و برای پسپردازش مورد استفاده قرار گیرند.
این الگوریتمها با استفاده از روشهای ریاضی نوین نقشهبرداری، صفحهای از تصحیحات را در بین ایستگاههای مرجع برازش داده و از ضریب اطمینان و دقت مناسبی برخوردار هستند. در ادامه به معرفی الگوریتم VRSو MACخواهیم پرداخت [1].
2- روش ایستگاه مرجع مجازی (VRS)
در روش VRS، که یکی از پرکاربردترین الگوریتمهای RTKاست، یک ایستگاه مرجع مجازی توسط مرکز پردازش در نزدیکی محل Rover برای محاسبه تصحیحات مشاهدات ایجاد میشود. هدف اصلی در این روش کاهش فاصله بین ایستگاه مرجع و گیرنده Rover به منظور کاهش تأثیر خطای مداری ماهوارهها و تأخیرات اتمسفری و افزایش دقت تعیین موقعیت گیرنده Rover است.
روند کار به این صورت است که مشاهدات شبه فاصله و فاز موج حامل حداقل سه ایستگاه دائمی مرجع CORSکه در مجاورت Rover قرار دارند، توسط مرکز پردازش به طور پیوسته جمعآوری و پردازش میشود. به منظور تعیین موقعیت ایستگاه مرجع مجازی، یک ارتباط دو طرفه بین گیرنده Rover و مرکز پردازش با هدف انجام محاسبات برقرار میگردد. بدین صورت که کاربر در محل گیرنده Rover، مختصات تقریبی خود را با استفاده از فرمت NMEAبه مرکز پردازش ارسال میکند. دقت این مختصات تقریبی با دریافت اولین تصحیحات بهبود مییابد و دوباره به مرکز پردازش ارسال میشود. به عبارت دیگر، مرکز پردازش در این موقعیت تقریبی یک ایستگاه مرجع مجازی VRSایجاد نموده و با استفاده از مشاهدات ایستگاههای دائمی مرجع از طریق روشهای درونیابی خطی، غیرخطی و یا برازش صفحهای از تصحیحات، مجموعهای از مشاهدات و تصحیحات جیاناساس (GNSS) را برای ایستگاه مرجع مجازی محاسبه میکند.
زمانی که موقعیت ایستگاه مرجع مجازی مشخص گردید، تصحیحات با فرمت RTCM از طریق پروتکل NTRIP (مقاله مربوط به RTCM و NTRIP را میتوانید در این قسمت ببینید) توسط مرکز پردازش به گیرنده Rover ارسال شده و موقعیت Rover با دقت سانتیمتر تعیین میگردد [2].
برای ارسال تصحیحات VRS، از فرمت RTCM 3.x استفاده میشود. همچنین از RTCM 2.x (messages type 18&19 or 20&21) نیز میتوان استفاده کرد.
با استفاده از روشVRS، هم گیرندههای تک فرکانسه و هم چندفرکانسه (مولتیفرکانس) میتوانند از RTKتحت شبکه بهره برده و با استفاده از فرمت NMEAموقعیت تقریبی خود را ارسال کنند.
همانطور که اشاره شد باید یک ارتباط دو طرفه بین گیرنده Rover و مرکز پردازش فراهم شود تا گیرنده Rover مختصات تقریبی خود را با استفاده از فرمت NMEAارسال کند. این ارتباط دو طرفه منجر به محدودیت در تعداد کاربران جهت دریافت تصحیحات از مرکز پردازش میشود.
به منظور استفاده از الگوریتم VRS، باید دسترسی به اینترنت و یا لینک GSM وجود داشته باشد. چرا که در مرحله ارسال اطلاعات از مرکز پردازش به گیرنده Rover و یا بالعکس استفاده از لینک رادیویی میسر نیست.
اگر فاصله بین گیرنده Rover و ایستگاه مجازی به دست آمده از یک حد آستانه مشخص بیشتر شود، یک ایستگاه مجازی دیگر در نزدیکی محل فعلی گیرنده Rover مشخص شده و مورد استفاده قرار میگیرد. در این حالت به منظور رفع ابهام فاز، راهاندازی اولیه گیرنده Rover جهت دریافت و اعمال تصحیحات مجدداً انجام میشود.
به منظور محاسبه تصحیحات برای هر گیرنده Rover، از تعداد محدودی ایستگاههای مرجع (معمولاً 3 ایستگاه) استفاده میشود. این محدودیت، توانایی سیستم برای سازگاری با شرایط اتمسفر محیطی را کاهش میدهد. همچنین اگر به هر دلیلی اطلاعات هر یک از این 3 ایستگاه مرجع به مرکز پردازش ارسال نگردد، باید ایستگاه مرجع دیگری جایگزین شده و مجدداً محاسبات انجام شود و این خود باعث تأخیر در ارسال تصحیحات میگردد.
3- روش مفهوم اصلی-کمکی (MAC)
این روش بعد از VRSایجاد شده و شامل یک ایستگاه اصلی (Base Station) و تعدادی ایستگاه دائمی مرجع CORSاست. به منظور کاهش حجم اطلاعاتی که در شبکه ارسال میشود، تمام تصحیحات و اطلاعات مربوط به موقعیت، تنها توسط یک ایستگاه مرجع به نام ایستگاه اصلی فرستاده شده و سایر ایستگاههای CORSبه عنوان ایستگاه کمکی (Auxiliary Staion) مورد استفاده قرار گرفته و اختلاف تصحیحات و اختلاف موقعیت هر یک از آنها نسبت به ایستگاه اصلی محاسبه میشود. ایستگاه اصلی لزوماً نزدیکترین ایستگاه به گیرنده Rover نیست و اگر به هر دلیلی اطلاعات این ایستگاه فراهم نبود، یکی از ایستگاههای کمکی به عنوان ایستگاه اصلی در نظر گرفته میشود .
در روشMAC، شبکه بر اساس خوشه (Cluster) و سلول (Cell) طراحی میشود. هر شبکه شامل چند خوشه است (که ممکن است با هم همپوشانی داشته باشند). به عبارت دیگر هر خوشه یک زیرمجموعه از شبکه ایستگاههای دائمی مرجع است و به گونهای انتخاب میشود که با توجه به روش تفاضلی دوگانه، ابهام فاز موجود حذف گردد. هر سلول متشکل از حداقل سه ایستگاه در یک خوشه و یک ایستگاه اصلی است.
شکل 2: سمت چپ: نمایش چند خوشه در یک شبکه MAC. سمت راست: نمایش یک خوشه که تصحیحات MAC را برای چند Rover ارائه میدهد. هر Rover متناسب با موقعیت خود از مناسبترین سلول تصحیحات را دریافت میکند. [4]
در مرکز پردازش، با توجه به تعداد ماهوارههای GNSS و با استفاده از تصحیحات حداقل 5 ایستگاه دائمی مرجع CORSنزدیک به گیرنده Rover، یک سلول ایجاد میگردد. از این سلول بهمنظور ارسال تصحیحات (MAC) برای کاربر در محل گیرنده Rover استفاده میشود[3] .
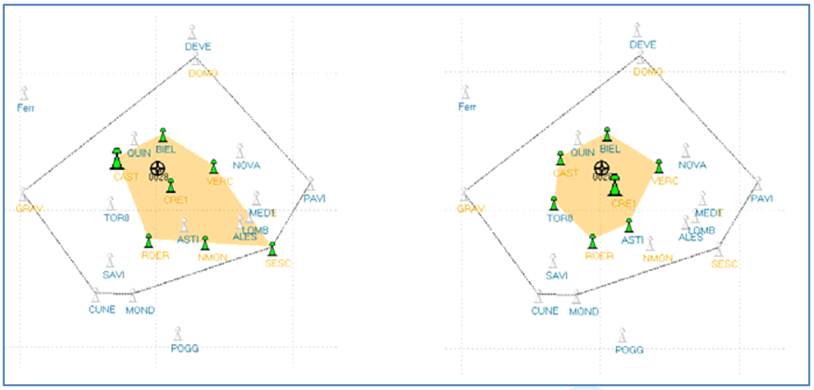
در شکل 3 دو نمونه سلول نمایش داده شده است.
شکل 3: نمونهای از تعریف دو سلول متفاوت در معماری MAC. سمت چپ: با تمام ایستگاههای CORS موجود، سمت راست: با تعداد محدودی از ایستگاههای CORS [3]
در روش MAC، محاسبات انجام شده در مرکز پردازش نسبت به روش VRSکمتر است. در واقع در مرکز پردازش برآوردی از ابهام فاز و خطای ساعت انجام میشود و بخش اصلی محاسبات در گیرنده Rover صورت میپذیرد. گیرنده Rover با استفاده از همه اطلاعات موجود، به درونیابی تصحیحات شبکه میپردازد.
در روش MACبا استفاده از شبکه اینترنت، محدودیتی در تعداد کاربران وجود ندارد. هر کاربر در محل گیرنده Rover از مناسبترین سلول بهره میگیرد تا تصحیحات را دریافت کند. MAX شامل تصحیحات شبکهای MACاست [4].
در Broadcast-MAX، از لینک رادیویی و سلولهایی که در شبکه توسط مرکز پردازش از پیش تعریف شدهاند استفاده میشود. کاربر در محل گیرنده Rover از مناسبترین سلول برای دریافت تصحیحات استفاده میکند.
در Auto-MAX، کاربر در محل گیرندهRover ، مختصات تقریبی خود را با استفاده از فرمت NMEAبه مرکز پردازش ارسال میکند و بدین ترتیب یک رابطه دو طرفه برقرار شده تا مناسبترین سلول به صورت اتوماتیک انتخاب شود. در واقع نزدیکترین ایستگاه به گیرنده Rover به عنوان ایستگاه اصلی انتخاب میگردد. این امکان وجود دارد که برای انتخاب مناسبترین سلول، ابتدا از سلولهای از پیش تعریف شده استفاده کرده و با توجه به حرکت گیرنده Rover به روز رسانی شود.
برای گیرندههایی که قادر به دریافت تصحیحات با فرمت RTCM 3.0 نیستند، تصحیحات i-MAX به وجود آمده است. i-MAX یکی از پرکاربردترین روشهای مورد استفاده در RTKتحت شبکه است و تفاوت اصلی این روش با MAX در این است که مرکز پردازش علاوه بر برآورد ابهام فاز، به محاسبه تصحیحات شبکه پرداخته و به مشاهدات ایستگاه اصلی اعمال میکند. در حالی که همانطور که گفته شد در MAX بخش اصلی محاسبات در گیرنده Rover صورت میپذیرد. روند پردازش در i-Max مانند VRSاست با این تفاوت که از ایستگاه مجازی استفاده نشده و امکان پیگیری و ردیابی تصحیحات دریافت شده توسط Rover وجود دارد. در این روش، یک ارتباط دو طرفه بین گیرنده Rover و مرکز پردازش فراهم میشود تا گیرنده Rover مختصات تقریبی خود را با استفاده از فرمت NMEAارسال نموده و سپس مشاهدات و تصحیحات لازم را از مرکز پردازش دریافت میکند. در این الگوریتم برای ارسال تصحیحات از فرمت RTCM 2.x نیز میتوان استفاده نمود[4].